 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
بسیاری از سیستمهای کنترل به صورت غیرخطی مدل میشوند تا با پدیده مدل شده تطابق کافی داشته باشد. به همین جهت سیستمهای کنترل غیرخطی یکی از مهمترین مباحث در مهندسی کنترل بوده و تمام دانشجویان کارشناسی ارشد و دکترای مهندسی برق-کنترل ملزم به گذراندن این درس میباشند. با اینکه مراجع فراوانی برای این درس موجود است، اما در هیچ مرجعی تمرینات حل شده به صورت تفضیلی موجود نیست و حل آنها به عهده خواننده واگذار شده. برای پر کردن این خلا تصمیم گرفتم که حل تشریحی تعدادی از مسایل منتخب در زمینههای گوناگون سیستمهای کنترل غیرخطی را در اختیار شما قرار دهم تا به درک بیشتر شما از کنترل غیرخطی افزوده و بعضی مفاهیم گنگ و ناملموس موجود را با مثالهای مختلف شفاف کنم. تمرینات در پنج بخش جداگانه به شرح زیر تقدیم میشود:
دیاگرام فاز (Phase Portrait)– سیکل حدی (Limit Cycle)
- تابع توصیفی (Describing Function)
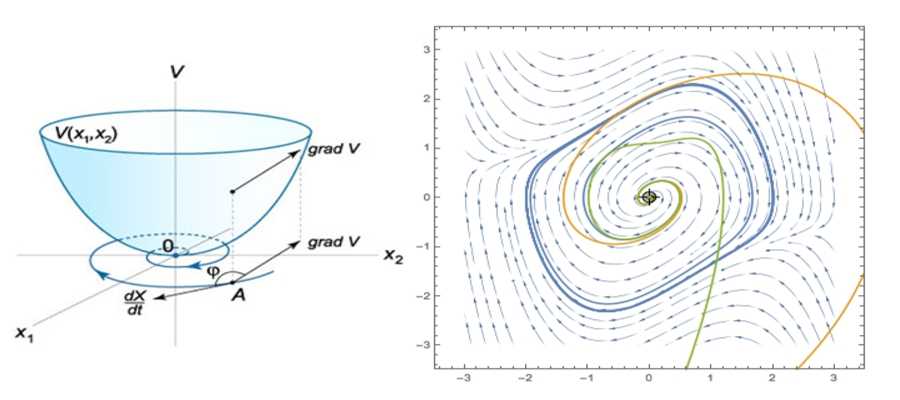
- تحلیل پایداری لیاپونوف (Lyapunov Stability)
- ملاک دایره (Circle Criterion)– ملاک پوپوف (Popov Criterion)– پایدارسازی با تابع لیاپونوف
- خمینه مرکز (Center Manifold)– خطیسازی با فیدبک (Feedback Linearization)– مد لغزشی (Sliding Mode)
علاوه بر حل تمرینات فوق، دو پروژه انجام شده درباره طراحی کنترلکننده های خطیسازی با فیدبک و مدلغزشی (به دو روش مرسوم و انتگرالی) به همراه مستندات نحوه طراحی و کدهای شبیهسازی و فایل سیمولینک نیز ارائه میشود. هر دوی پروژه ها بر روی دینامیک غیرخطی یک شناور مغناطیسی پیادهسازی شدهاند. همچنین صورت سوالات و تمرینات حل شده به صورت رایگان در اختیار شما قرار گرفته است که از لینک بالا قابل دانلود است.
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.




alikashan
سلام آقای جوادی کاشونی
لطفا فیلم آموزشی کنترل غیرخطی رو هم درست کنید
ممنون از سایت خوبتون
علی جوادی
سلام
بنده کاشانی نیستم.
در این مورد با دکتر موسی پور صحبت کنید.