در این جلسه سیستم کوادروتور از لحاظ سخت افزاری و عملکردی به طور کامل توضیح داده می شود. این جلسه تحت عنوان پیش درامدی بر کوادروتور ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
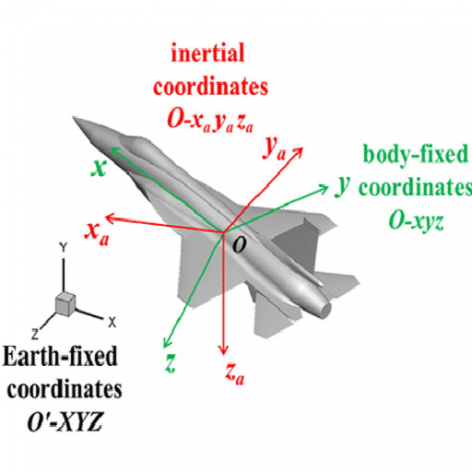
در این جلسه مفهوم پایه ای عملکرد سیستم کوادروتور، معرفی محورهای فرضی حاکم بر سیستم، نحوه انتقال از فریم بدنه به فریم اینرسایی و بالعکس و همچنین نحوه استخراج معادلات دینامیکی موتورهای براشلس DC مورد استفاده در سیستم کوادروتور به طور کامل توضیح داده می شود. . این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (1) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی کوادروتور شامل متغیرهای حالت سیستم به طور کامل بررسی می شود. در ادامه معادلات دینامیکی حاکم بر سیستم کوادروتور از طریق دو روش نیوتن-اویلر و همچنین اویلر-لاگرانژ به صورت جداگانه و به تفصیل توضیح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (2) ارایه می شود.
مدت زمان: 53 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی سیستم کوادروتور از منظری دیگر مورد بررسی قرار می گیرد و مدلسازی سیستم کوادروتور بر مبنای تعاریف علم سینماتیک و علم دینامیک انجام و معادلات ریاضی سیستم استخراج می گردد . در ادامه نیروها و گشتاورهای وارد بر سیستم کوادروتور به طور کامل توضیح داده می شوند و در نهایت نحوه به دست اوردن معادلات فضای حالت سیستم شرح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (3) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به علم ایرودینامیک پرواز پرداخته می شود. نیروهای ایرودینامیکی به طور کامل توضیح داده می شوند و سپس ایرودینامیک عمودپروازها به طور اختصاصی برای سیستم کوادروتور مطرح و روابط ان استخراج می گردد. در ادامه نحوه محاسبه سرعت و مسیر باد که مهمترین عامل اغتشاش خارجی بر هم زننده تعادل این سیستم پرنده می باشد، مطرح می گردد. این جلسه تحت عنوان ایرودینامیک پرواز (1) ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
این جلسه در ادامه جلسه پنجم ، به تکمیل روابط ریاضی ایرودینامیک پرواز سیستم کوادروتور می پردازد. در ادامه روش های محاسبه نیروی دراگ جهت تخمین بردار و مسیر باد به طور کامل شرح داده می شوند و در نهایت معادلات فضای حالت سیستم کوادروتور به همراه اثرات ایرودینامیکی استخراج می گردند. این جلسه تحت عنوان ایرودینامیک پرواز (2) ارایه می شود.
مدت زمان: 50 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
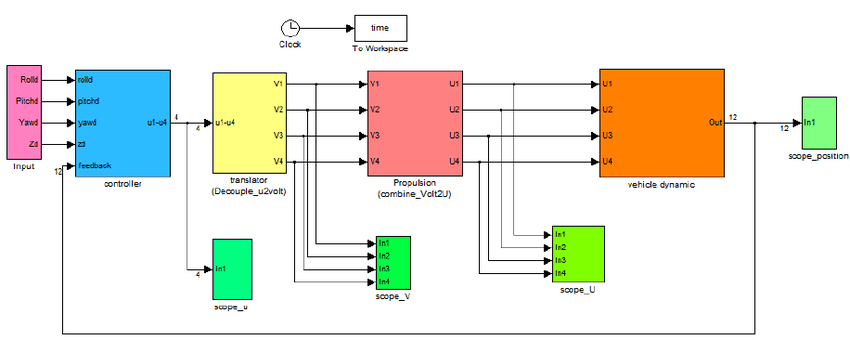
در این جلسه به ساختار کنترلی سیستم کوادروتور پرداخته می شود و تمامی لایه های کنترلی به همراه بلوک دیاگرام انها و ارتباط بین هریک از این لایه های کنترلی به طور کامل مطرح می گردد . دانش کسب شده در این جلسه پیش زمینه طراحی هر نوع کنترلر دلخواه برای این سیستم پرنده می باشد.
مدت زمان: 66 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه فیلتر کالمن پیوسته توسعه یافته به عنوان یک مشاهده گر و تخمین زننده مطرح در سیستم های غیر خطی معرفی می گردد و در نهایت نحوه تخمین متغیرهای حالت سیستم کوادروتور بر مبنای این نوع فیلتر خاص به طور کامل توضیح داده می شود..
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه نحوه پیاده سازی روش کنترلی مد لغزشی بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 72 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720P
در این جلسه نحوه پیاده سازی الگوریتم بهینه سازی ژنتیک به عنوان یک روش تحلیلی ، جهت محاسبه دقیق تری از پارامترهای کنترل کننده مد لغزشی اموزش داده می شود.
مدت زمان: 74 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی فیلتر کالمن پیوسته توسعه یافته ، جهت تخمین متغیرهای حالت سیستم کوادروتور در نرم افزار متلب اموزش داده می شود.
مدت زمان: 47 دقیقه
فایل های همراه: فایل تصویری ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی کنترل کننده پسگام (Backstepping) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 57 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه اموزشی ، نحوه پیاده سازی یک کنترل کننده مقاوم و بهینه ترکیبی(ROSMC) بر مبنای معادلات ریکاتی وابسته به حالت ( SDRE) تحت عنوان (Robust Optimal Sliding Mode Control based on SDRE) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب در چهار بخش جداگانه به صورت زیر اموزش داده می شود.
مدت زمان جلسه :4 ساعت و30 دقیقه
فایل های همراه جلسه: فایل تصویری ، فایل پاورپوینت درس ، ، m-file های نرم افزار متلب
بخش اول :
طراحی قانون کنترل بهینه مقاوم با استفاده از کنترل کننده مد لغزشی بر اساس معادلات
ریکاتی وابسته به حالت
مدت زمان بخش اول : 2 ساعت و 5 دقیقه
فایل های همراه بخش اول: فایل تصویری ، فایل پاورپوینت درس ، فایل PDF پاورپوینت درس
پیش نمایش جلسه اول
بخش دوم:
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Point to Point
مدت زمان بخش دوم : 1 ساعت و 5 دقیقه
فایل های همراه بخش دوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش دوم
بخش سوم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Trajectory Tracking
مدت زمان بخش سوم : 35 دقیقه
فایل های همراه بخش سوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش سوم
بخش چهارم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
جهت محاسبه خطای Minimum Mean Square Error
مدت زمان بخش چهارم 45 دقیقه
فایل های همراه بخش چهارم : فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش چهارم
در این جلسه اموزشی ، نحوه پیاده سازی کنترل کننده گام به عقب(Backstepping) به صورت ترکیب با فیلتر کالمن توسعه یافته پیوسته (Extended Kalman Bucy Filter) در حالت ردیابی یک مسیر از پیش تعیین شده (Trajectory Tracking) ، بر روی سیستم کوادروتور به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان جلسه :45 دقیقه
فایل های همراه جلسه: فایل تصویری ، m-file های نرم افزار متلب
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم




پژمان
سلام خانم مهندس وقت بخیر
ممنون بابت تمام زحمات
بنده قبلا جلسات 1 الی 12 این درس رو که به صورت جلسه ای امکان خرید بود را خریداری کردم ، الان جلسات 13 و 14 را می خواهم خریداری کنم ولی متاسفانه این امکان وجود ندارد . لطفا اگر می شود پیگیری بفرمایید تا این دو جلسه آخر را بشود به طور جداگانه خریداری کرد.
سپاس فراوان
مهندس بابایی
با سلام
متاسفانه این موضوع دیگر امکان پذیر نیست و تمام دروس یکپارچه شده اند.
موفق باشید.
میرمیکائیل فاطمی ( مالک تایید شده )
با سلام و خسته نباشید و تشکر از آموزش خوبتون
من میخواستم شروع به ساخت کواد کنم و چنتا سوال داشتم.
بنده دقیق محاسبات درگ تراست رو متوجه نشدم. من برای کواد خودم دقیقا چطور باید اینها رو محاسبه کنم؟
معکوس ماتریس حرکت مطرح شده تو آموزش با توجه به چیزی که تو مقالات دیدم ظاهرا برای فرمت + هستش. در صورت برداشت صحیح بنده لطفا فرمت X رو هم بفرمایید.
تا جایی که متوجه شدم 6 ضریب اصلی رو میشه با سنسورها بدست آورد و باید باقی ضرایب رو با همین مقادیر محاسبه کرد. درست؟
مهندس بابایی
سلام بر شما
سوال شما کامل در فیلم اموزشی توضیح داده شده است.لطفا مجددا بخش مربوطه را بازبینی بفرمایید.
پاشخ سوال دوم شما هم بله هست.
موفق باشید.
اسماعیل محمدی ( مالک تایید شده )
سلام خانم مهندس. وقتتون بخیر.
بنده فایل های آموزشی شما رو خریداری کردم ولی متاسفانه بخاطر کد روی آموزش ها نتونستم استفاده کنم و هرچی از طریق تلگرام، تماس تلفنی و اینستاگرام پیگیری میکنم جوابگو نیستن. اگه بخواین عکس مکالمات و پیام ها رو هم خدمتتون ارسال میکنم. تو این سایت هیچکس جوابگو نیس. قبلا بنده محصولات آقای جوادی رو گرفته بودم و خیلی رضایت داشتم برای همین بعد از اون نزدیک به 4 میلیون از سایت خرید کردم که محصولات شما و آقاای حقیقی هم شامل میشه. ولی همشون برام بلااستفاده موندن و هیچکی جوابگو نیست. حتی تلفن موجود در سایت هم که تماس میگیرم میگن اشتباهه. الان من باید چیکار کنم؟ تکلیف ماها که به سایت اعتاد کردیم چیه؟ لطفا اگه میتونین یک ایمیل به بنده بدین که تمامی این موارد رو از طریق ایمیل خدمتتون ارسال کنم که باورتون بشه و مشکل بنده رو حل کنین. واقعا آخرین راهکارم این بود که اینجا پیام بدم که بعید میدونم بازم کسی ببینه یا جواب بده.
مهندس بابایی
سلام بر شما
به خاطر مشکل به وجو امده از شما عذرخواهی می کنیم.
ایا مشکل شما برطرف شد؟
مهندس بابایی
بله
مهندس بابایی
مشکل به وجود امده برطرف گردید.
نعیم
سلام استاد، میشه یک فیلم بر مبنای fault detection در سیستم های UAV تهیه بفرمایید.
مهندس بابایی
سلام بر شما
متاسفانه به علت مشغله کاری فراوان، در اینده نزدیک این امر امکان پذیر نیست.
موفق باشید.
رضا
سلام
بخش اول رو خریدم ولی متاسفانه فایل rar مشکل داره و باز نمیشه. لطفا رسیدگی کنید
مهندس بابایی
سلام بر شما
لطفا مشکل خود را با پشتیبانی یا مدیریت سایت مطرح کنید تاسریعتر برطرف گردد.
عماد
سلام و عرض احترام
ممنون از ارائه خوبتون،
من توی مقالات عبارت zero dynamics می بینم ولی متوجه ان نمی شم اگر امکان داره یه توضیح در موردش بدید.
تشکر
ابوالفضل
با سلام و احترام خدمت شما استاد گرامی
بنده دانشجوی ارشد کنترل هستم. دوره شما را تهیه کردم و خداروشکر برام مفیده و بسیار راضی هستم. لذا لازم دانستم ابتدا از شما تشکر کنم.
سوالم این هست که:
شبیه سازی انجام شده در جلسه نهم (مد لغزشی)، بر اساس کدام مقاله میباشد؟ ممنون میشوم اگر اسم مقاله یا doi آن را بفرمایید.
با تشکر
مهندس بابایی
سلام بر شما
از لطف شما به این مجموعه اموزشی سپاسگزارم.
من از پایان نامه هایی که رو این زمینه کار شده بود استفاده کردم که الان در ارشیو کامپیوترم ندارم چون برای چند سال پیش هست. شما برای ارجاع می تونید از مقالاتی که از همین روش استفاده کردند استفاده کنید. من لینک برخی از مقالات چاپ شده خودم رو براتون قرار می دهم و از هریک از اونها می تونید جهت رفرنس دهی استفاده نمایید:
https://journals.sagepub.com/doi/full/10.1177/0142331216640600
http://ijeee.iust.ac.ir/article-1-1258-en.html
https://miscj.aut.ac.ir/article_3113.html
https://ieeexplore.ieee.org/document/7985155
https://civilica.com/doc/325799/
https://www.academia.edu/download/58029840/Robust_Backstepping_Controlmechateronic_journal.pdf
http://psc-ir.com/cd/2016/papers/1421.pdf
موفق باشید.
امیرعلی
سلام .وقت بخیر .سپاسگذارم از آموزش خوبتون و قدرت بیان خیلی عالی شما
سوال بنده این هست چرا برای تخمین فیلتر کالمن ورودی ما بجز شش شتاب از شش سرعت هم استفاده شده.
استاد بنده همین را سر کلاس مطرح کرده بودند که ورودی ما شش تا شتاب بدست آمده از شتاب سنج میباشد تا دوازده حالت را تخمین بزنیم. ولی شما بجز شش شتاب ، شش سرعت هم وارد کرده اید.
مهندس بابایی
سلام بر شما
از لطف شما سپاسگزارم.
هر دو روش به کار گرفته شده صحیح می باشد. از تمام حالت ها استفاده شده تا هر یک از حالت های تخمین زده شده با متغیر اصلی خود مقایسه شود و درصد خطا در کمترین حالت خود قرار گیرد، اما اگر سنسوری در دسترس باشد که تمام حالت ها را تخمین بزند به شرط حداقل خطا، تفاوتی نمی کند.
موفق باشید.
a.hadavandkhani@gmail.com
با عرض سلام و خسته نباشید
اینجانب هم اکنون دانشجوی ارشد مهندسی کنترل هستم آموزش کوادکوپتر را که شما زحمت تدریسش رو کشیدید تهیه کردم مشغول یادگیری هستم بسیار تدریس روان و عالی هست وتشکر میکنم
چنتا سوال داشتم از حضورتان داشتم اگر پاسخ بدهید ممنون میشم
حقیقتش من قصد اپلای دارم میخواستم بدونم
آیا مقاله در آوردن دراین حوزه شدنی هست؟
در کدام مباحث جذابیت وجود داره
من بحث فیلتر کالمن و شناسایی رو هم دارم دنبال میکنم
اگر لطف بفرمایید حوزه هایی که با کوادروتور میشه برای مقاله فعالیت کرد و همچنین پیش نیاز هایی که لازم دارد را راهنمایی بفرمایی ممنونتون میشم
🙏🏻🙏🏻
مهندس بابایی
سلام بر شما
ازحسن توجه شما ممنونیم و خوشحالیم که این مجموعه اموزشی تا این اندازه مورد پسند شما و سایر دوستان قرار گرفته است.
ببینید در تعیین موضوع یک پایان نامه عوامل مختلفی دخیل هستند که باید تمام انها را مدنظر قرار دهید. به عنوان مثال اینکه میزان تسط شما بر روی ساختار سیستم مورد نظر ( کوادروتور) چقدر است؟ اگر به دنبال طراحی کنترل کننده بر روی این سیستم هستید، میزان تسلط شما بر روی کدام دروس ارشد بیشتر است؟ موضوعات کار شده به روز در رابطه با سیستم شما ( کوادروتور) چه مباحثی هستند یعنی چه روش هایی تا به امروز روی سیستم شما پیاده سازی شدند که جای توسعه دارند؟ و سوالات بسیار زیادی که در اینجا نمی توان همه انها را عنوان نمود اما می توان راجه به انها مفصل صحبت نمود، که بعد از پاسخ به تمام این سوالات می توان به یک جمع بندی برای موضوع یک پایان نامه رسید و پروپزال کار خود را تهیه نمایید. البته فراموش نکنید که نظر استاد راهنمای شما نیز در تعیین موضوع پایان نامه بسیار مهم است.
من کار کردن بر روی سیستم های همکاز این ربات پرنده را پیشنهاد می دهم. من شخصا روی بحث Multi-agent flocking and swarming کار نکرده ام. اما روی بحث cooperative control of UAVs کار کردم و مقالاتی هم در این زمینه دارم. ببینید چند موضوع در این رابطه مهم هستش. ابتدا اینکه شما باید بر روی ساختار سیستم کوادروتور تسلط کامل داشته باشد و با تمام ineraction های معادلات دینامیکی اون اشنا باشید. در مرحله بعد شما می بایست به حداقل چند روش کنترلی مربوط به حالت single کوادروتور تسلط کافی پیدا کنید که این کاملا مرتبط میشه با اینکه شما تا چه میزان به دروس کنترلی ارشدی که پاس کردین مسلط هستید. بعد از اتمام این دوره حالا می تونید برید سراغ بحث cooperative control برای سیستم کوادروتور.
در بحث cooperative control الگوریتم های بسیار زیادی وجود دارند: centrlaized control, decentralized control, leader follower control, master slave control و…………… اما چون بحث کوادروتور به عنوان یک case study مطرح میشه، بنابراین کتاب جامع اموزشی در این زمینه وجود ندارد و بهترین منبع برای کسب اطلاعات در زمینه انواع روش های single و یا cooperative برای سستم کوادروتور اخرین مقالات و پایان نامه های منتشر شده از این موضوع هست که می بایست در پایگاه های علمی معتبر مانند وب او ساینس (web of science) ، گوگل اسکالر ، اسکوپوس و…. به دنبال اونها باشید.
موفق باشید.
a.hadavandkhani@gmail.com
خیلی تشکر میکنم لطف فرمودید ممنون از راهنماییتان🙏🏻🙏🏻🙏🏻🙏🏻🙏🏻🙏🏻🙏🏻🙏🏻🙏🏻🙏🏻🙏🏻🙏🏻
مهندس بابایی
خواهش می کنم.
a.hadavandkhani@gmail.com
خیللللللللللی مممنونم از راهنماییتون
مهندس بابایی
زنده باشید.
علی
سلام خانم مهندس
ببخشید داخل سایت یک مقاله شبیه سازی شده در مورد کواد کنترل ها بود اما الان انگار حذف شده
ممکنه راهنمایی بفرمایید.
مهندس بابایی
سلام بر شما
فقظ یک مقاله در رابطه با pvtol ها که نوعی عمود پرواز هستند شبیه سازی شده است که ان هم در سایت موجود می باشد:
https://www.controlref.com/pvtol/
موفق باشید.