در این جلسه سیستم کوادروتور از لحاظ سخت افزاری و عملکردی به طور کامل توضیح داده می شود. این جلسه تحت عنوان پیش درامدی بر کوادروتور ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
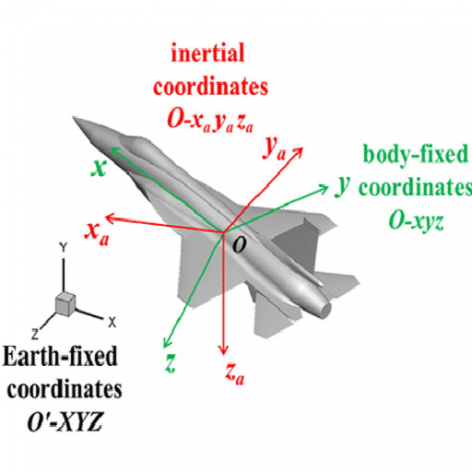
در این جلسه مفهوم پایه ای عملکرد سیستم کوادروتور، معرفی محورهای فرضی حاکم بر سیستم، نحوه انتقال از فریم بدنه به فریم اینرسایی و بالعکس و همچنین نحوه استخراج معادلات دینامیکی موتورهای براشلس DC مورد استفاده در سیستم کوادروتور به طور کامل توضیح داده می شود. . این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (1) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی کوادروتور شامل متغیرهای حالت سیستم به طور کامل بررسی می شود. در ادامه معادلات دینامیکی حاکم بر سیستم کوادروتور از طریق دو روش نیوتن-اویلر و همچنین اویلر-لاگرانژ به صورت جداگانه و به تفصیل توضیح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (2) ارایه می شود.
مدت زمان: 53 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی سیستم کوادروتور از منظری دیگر مورد بررسی قرار می گیرد و مدلسازی سیستم کوادروتور بر مبنای تعاریف علم سینماتیک و علم دینامیک انجام و معادلات ریاضی سیستم استخراج می گردد . در ادامه نیروها و گشتاورهای وارد بر سیستم کوادروتور به طور کامل توضیح داده می شوند و در نهایت نحوه به دست اوردن معادلات فضای حالت سیستم شرح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (3) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به علم ایرودینامیک پرواز پرداخته می شود. نیروهای ایرودینامیکی به طور کامل توضیح داده می شوند و سپس ایرودینامیک عمودپروازها به طور اختصاصی برای سیستم کوادروتور مطرح و روابط ان استخراج می گردد. در ادامه نحوه محاسبه سرعت و مسیر باد که مهمترین عامل اغتشاش خارجی بر هم زننده تعادل این سیستم پرنده می باشد، مطرح می گردد. این جلسه تحت عنوان ایرودینامیک پرواز (1) ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
این جلسه در ادامه جلسه پنجم ، به تکمیل روابط ریاضی ایرودینامیک پرواز سیستم کوادروتور می پردازد. در ادامه روش های محاسبه نیروی دراگ جهت تخمین بردار و مسیر باد به طور کامل شرح داده می شوند و در نهایت معادلات فضای حالت سیستم کوادروتور به همراه اثرات ایرودینامیکی استخراج می گردند. این جلسه تحت عنوان ایرودینامیک پرواز (2) ارایه می شود.
مدت زمان: 50 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به ساختار کنترلی سیستم کوادروتور پرداخته می شود و تمامی لایه های کنترلی به همراه بلوک دیاگرام انها و ارتباط بین هریک از این لایه های کنترلی به طور کامل مطرح می گردد . دانش کسب شده در این جلسه پیش زمینه طراحی هر نوع کنترلر دلخواه برای این سیستم پرنده می باشد.
مدت زمان: 66 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه فیلتر کالمن پیوسته توسعه یافته به عنوان یک مشاهده گر و تخمین زننده مطرح در سیستم های غیر خطی معرفی می گردد و در نهایت نحوه تخمین متغیرهای حالت سیستم کوادروتور بر مبنای این نوع فیلتر خاص به طور کامل توضیح داده می شود..
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
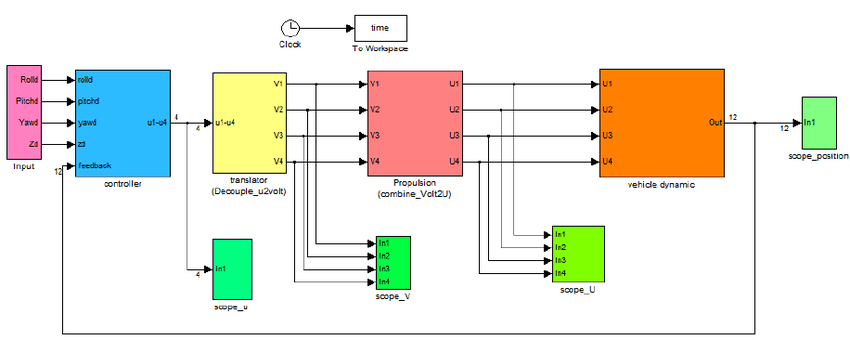
در این جلسه نحوه پیاده سازی روش کنترلی مد لغزشی بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 72 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720P
در این جلسه نحوه پیاده سازی الگوریتم بهینه سازی ژنتیک به عنوان یک روش تحلیلی ، جهت محاسبه دقیق تری از پارامترهای کنترل کننده مد لغزشی اموزش داده می شود.
مدت زمان: 74 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی فیلتر کالمن پیوسته توسعه یافته ، جهت تخمین متغیرهای حالت سیستم کوادروتور در نرم افزار متلب اموزش داده می شود.
مدت زمان: 47 دقیقه
فایل های همراه: فایل تصویری ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی کنترل کننده پسگام (Backstepping) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 57 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه اموزشی ، نحوه پیاده سازی یک کنترل کننده مقاوم و بهینه ترکیبی(ROSMC) بر مبنای معادلات ریکاتی وابسته به حالت ( SDRE) تحت عنوان (Robust Optimal Sliding Mode Control based on SDRE) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب در چهار بخش جداگانه به صورت زیر اموزش داده می شود.
مدت زمان جلسه :4 ساعت و30 دقیقه
فایل های همراه جلسه: فایل تصویری ، فایل پاورپوینت درس ، ، m-file های نرم افزار متلب
بخش اول :
طراحی قانون کنترل بهینه مقاوم با استفاده از کنترل کننده مد لغزشی بر اساس معادلات
ریکاتی وابسته به حالت
مدت زمان بخش اول : 2 ساعت و 5 دقیقه
فایل های همراه بخش اول: فایل تصویری ، فایل پاورپوینت درس ، فایل PDF پاورپوینت درس
پیش نمایش جلسه اول
بخش دوم:
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Point to Point
مدت زمان بخش دوم : 1 ساعت و 5 دقیقه
فایل های همراه بخش دوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش دوم
بخش سوم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Trajectory Tracking
مدت زمان بخش سوم : 35 دقیقه
فایل های همراه بخش سوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش سوم
بخش چهارم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
جهت محاسبه خطای Minimum Mean Square Error
مدت زمان بخش چهارم 45 دقیقه
فایل های همراه بخش چهارم : فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش چهارم
در این جلسه اموزشی ، نحوه پیاده سازی کنترل کننده گام به عقب(Backstepping) به صورت ترکیب با فیلتر کالمن توسعه یافته پیوسته (Extended Kalman Bucy Filter) در حالت ردیابی یک مسیر از پیش تعیین شده (Trajectory Tracking) ، بر روی سیستم کوادروتور به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان جلسه :45 دقیقه
فایل های همراه جلسه: فایل تصویری ، m-file های نرم افزار متلب
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم




مهندس بابایی
سلام بر شما
پاسخ به علی:
متاسفانه به علت مشغله کاری در حال حاضر امکان انجام پروژه با من امکانپذیر نمی باشد.
برای اطلاعات بیشتر می بایست به مقالات به روز در پایگاه های زیر مراجعه کنید.
https://onlinelibrary.wiley.com/
https://www.scopus.com/standard/marketing.uri
https://www.sciencedirect.com/
موفق باشید.
مهندس بابایی
سلام بر شما
مطابق با توضیحات ذکر شده در قسمت اموزش، قیود لازم اعمال شده است.
برای اطلاعات بیشتر می بایست به مقالات به روز در پایگاه های زیر مراجعه کنید.
https://onlinelibrary.wiley.com/
https://www.scopus.com/standard/marketing.uri
https://www.sciencedirect.com/
موفق باشید.
محمد
سلام
یک سوال داشتم. در فصل 13 گفته شده که در روش SDRE قابلیت اعمال قید بر روی وروی کنترلی وجود دارد اما در مثال در نظر گرفته شده این قید اعمال نشده. ممنون می شوم بفرمایید چگونه می توان قید ورودی را به طراحی اضافه کرد و اگر منبعی سراغ دارید بفرمایید.
ممنون
علی ( مالک تایید شده )
با سلام – آموزش خوبی بود . البته تا اینجا وارد کد نویسی نشدم و آموزش تیوری را دیدم . در رابطه با مشورت در انجام پروژه های مشابه چطور می شود با شما مشورت نمود ؟ آیا می توانید چند مقاله که مربوط به آموزش همین درس باشد را برای من ارسال کنید / ممنون میشم
aa
سلام وقت به خیر. دمو چند دقیقه ای از آموزش تون موجود هست؟ سر فصل های آموزشی چه مواردی هستند؟
مدیر سایتادمین سایت ( مالک تایید شده )
سلام برای تک تک مجموعه ها و برای تک تک جلسات پیش نمایش وجود داره. لطفا با دقت بیشتری این پست رو بخونید مخصوصا اونجایی که نوشته برای توضیحات بیشتر کلیک کنید!
sepide
:((( ey kash mishod nesf jalasato kharidari kard. vaghaan in hazine baraye bazi ha ziade
مهندس بابایی
با سلام
متاسفانه امکانش نیست.