در این جلسه سیستم کوادروتور از لحاظ سخت افزاری و عملکردی به طور کامل توضیح داده می شود. این جلسه تحت عنوان پیش درامدی بر کوادروتور ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
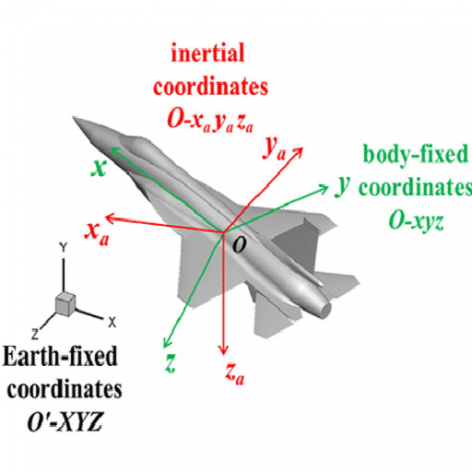
در این جلسه مفهوم پایه ای عملکرد سیستم کوادروتور، معرفی محورهای فرضی حاکم بر سیستم، نحوه انتقال از فریم بدنه به فریم اینرسایی و بالعکس و همچنین نحوه استخراج معادلات دینامیکی موتورهای براشلس DC مورد استفاده در سیستم کوادروتور به طور کامل توضیح داده می شود. . این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (1) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی کوادروتور شامل متغیرهای حالت سیستم به طور کامل بررسی می شود. در ادامه معادلات دینامیکی حاکم بر سیستم کوادروتور از طریق دو روش نیوتن-اویلر و همچنین اویلر-لاگرانژ به صورت جداگانه و به تفصیل توضیح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (2) ارایه می شود.
مدت زمان: 53 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی سیستم کوادروتور از منظری دیگر مورد بررسی قرار می گیرد و مدلسازی سیستم کوادروتور بر مبنای تعاریف علم سینماتیک و علم دینامیک انجام و معادلات ریاضی سیستم استخراج می گردد . در ادامه نیروها و گشتاورهای وارد بر سیستم کوادروتور به طور کامل توضیح داده می شوند و در نهایت نحوه به دست اوردن معادلات فضای حالت سیستم شرح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (3) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به علم ایرودینامیک پرواز پرداخته می شود. نیروهای ایرودینامیکی به طور کامل توضیح داده می شوند و سپس ایرودینامیک عمودپروازها به طور اختصاصی برای سیستم کوادروتور مطرح و روابط ان استخراج می گردد. در ادامه نحوه محاسبه سرعت و مسیر باد که مهمترین عامل اغتشاش خارجی بر هم زننده تعادل این سیستم پرنده می باشد، مطرح می گردد. این جلسه تحت عنوان ایرودینامیک پرواز (1) ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
این جلسه در ادامه جلسه پنجم ، به تکمیل روابط ریاضی ایرودینامیک پرواز سیستم کوادروتور می پردازد. در ادامه روش های محاسبه نیروی دراگ جهت تخمین بردار و مسیر باد به طور کامل شرح داده می شوند و در نهایت معادلات فضای حالت سیستم کوادروتور به همراه اثرات ایرودینامیکی استخراج می گردند. این جلسه تحت عنوان ایرودینامیک پرواز (2) ارایه می شود.
مدت زمان: 50 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به ساختار کنترلی سیستم کوادروتور پرداخته می شود و تمامی لایه های کنترلی به همراه بلوک دیاگرام انها و ارتباط بین هریک از این لایه های کنترلی به طور کامل مطرح می گردد . دانش کسب شده در این جلسه پیش زمینه طراحی هر نوع کنترلر دلخواه برای این سیستم پرنده می باشد.
مدت زمان: 66 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه فیلتر کالمن پیوسته توسعه یافته به عنوان یک مشاهده گر و تخمین زننده مطرح در سیستم های غیر خطی معرفی می گردد و در نهایت نحوه تخمین متغیرهای حالت سیستم کوادروتور بر مبنای این نوع فیلتر خاص به طور کامل توضیح داده می شود..
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه نحوه پیاده سازی روش کنترلی مد لغزشی بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 72 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720P
در این جلسه نحوه پیاده سازی الگوریتم بهینه سازی ژنتیک به عنوان یک روش تحلیلی ، جهت محاسبه دقیق تری از پارامترهای کنترل کننده مد لغزشی اموزش داده می شود.
مدت زمان: 74 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی فیلتر کالمن پیوسته توسعه یافته ، جهت تخمین متغیرهای حالت سیستم کوادروتور در نرم افزار متلب اموزش داده می شود.
مدت زمان: 47 دقیقه
فایل های همراه: فایل تصویری ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی کنترل کننده پسگام (Backstepping) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 57 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه اموزشی ، نحوه پیاده سازی یک کنترل کننده مقاوم و بهینه ترکیبی(ROSMC) بر مبنای معادلات ریکاتی وابسته به حالت ( SDRE) تحت عنوان (Robust Optimal Sliding Mode Control based on SDRE) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب در چهار بخش جداگانه به صورت زیر اموزش داده می شود.
مدت زمان جلسه :4 ساعت و30 دقیقه
فایل های همراه جلسه: فایل تصویری ، فایل پاورپوینت درس ، ، m-file های نرم افزار متلب
بخش اول :
طراحی قانون کنترل بهینه مقاوم با استفاده از کنترل کننده مد لغزشی بر اساس معادلات
ریکاتی وابسته به حالت
مدت زمان بخش اول : 2 ساعت و 5 دقیقه
فایل های همراه بخش اول: فایل تصویری ، فایل پاورپوینت درس ، فایل PDF پاورپوینت درس
پیش نمایش جلسه اول
بخش دوم:
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Point to Point
مدت زمان بخش دوم : 1 ساعت و 5 دقیقه
فایل های همراه بخش دوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش دوم
بخش سوم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Trajectory Tracking
مدت زمان بخش سوم : 35 دقیقه
فایل های همراه بخش سوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش سوم
بخش چهارم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
جهت محاسبه خطای Minimum Mean Square Error
مدت زمان بخش چهارم 45 دقیقه
فایل های همراه بخش چهارم : فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش چهارم
در این جلسه اموزشی ، نحوه پیاده سازی کنترل کننده گام به عقب(Backstepping) به صورت ترکیب با فیلتر کالمن توسعه یافته پیوسته (Extended Kalman Bucy Filter) در حالت ردیابی یک مسیر از پیش تعیین شده (Trajectory Tracking) ، بر روی سیستم کوادروتور به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان جلسه :45 دقیقه
فایل های همراه جلسه: فایل تصویری ، m-file های نرم افزار متلب
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم



javad
سلام خانم دکتر
ببخشید من در مفاهیم اولیه مشکل دارم
میشه همین جا این سوال رو جواب بدین
منظور از عدم قطعیتها در کوادرتور چيست و چگونه برای مقابله با آنها کنترلکننده باید تنظيم میشود؟ پارامترهای ترمها عدم قطعیتها در کوادرتور چگونه به دست میآیند؟
مهندس بابایی
با سلام
ببینید سیستم کوادروتور دارای دینامیک پیچیده ای است. اگر در مفاهیم اولیه مشکل دارید حتما جلسات ابتدایی این اموزش رو به دقت مطالعه بفرمایید.
در رابطه با بحث عدم قطعیت شما می بایست ابتدا مفهوم عدم قطعیت را درک کنید. عدم قطعیت به معنای تردید ما در اندازه گیری یک پارامتر می باشد.بنابراین هرگاه برای هر پارامتری خطایی در اندازه گیری ان وجود داشته باشد که برای ما ناشناخته باشد می تواند به عنوان یک سورس عدم قطعیت در نظر گرفته شود.
برای سیستم کوادروتور نیز، عدم قطعیت های کنترلی مانند عدم قطعیت پارامتری و عدم قطعیت دینامیک مدل نشده در نظر گرفته می شود که مثلا می تونید 30% عدم قطعیت در پارامترهای سیستم در نظر بگیرید.
روش هایی هم که برای خنثی کردن این عدم قطعیت ها معمولا در سیستم های مشابه کوادروتور در نظر گرفته می شوند، روش های مقاوم تطبیقی هست. یعنی روش های مانند H-بی نهایت، مد لغزشی که با کنترلر تطبیقی ترکیب می شوند و در نهایت با قوانین تطبیقی این عدم قطعیت ها تخمین زده می شوند و با کنترلر های مقاوم کنترل می شوند.
اما دوست عزیز این موضوع در سطح پیشرفته از دانش کوادروتور مطرح می شود، اگر شما هنوز در مفاهیم اولیه مشکل دارید، ورود به این موضوع برای شما کمی زود است.
موفق باشید.
جواد
خانم دکتر ببخشید سوال دیگه ای که در شبیه سازی ها برام پیش میاد بصورت زیر هستش ممنونم میشم جواب بدین.
منظور از عدم قطعیتها در کوادرتور چیه و چگونه برای مقابله با آنها کنترلکننده باید تنظيم بشه؟ همچنین پارامتر ترمهای عدم قطعیتها در کوادرتور چگونه به دست میان؟
مهندس بابایی
با سلام
پاسخ سوال شما در پرسش بعدی شما داده شده است. ملاحظه بفرمایید.
javad
با عرض معذرت و سپاس از وقتی که گذاشتن
اما برای من هیچی نشون نمیده
با تشکر از شما
مهندس بابایی
پاسخ سوال شما در سوال بعدی شما به طور کامل ذکر شد.
جواد
سلام خانم مهندس
وقتتون بخیر
بنده میخواستم یک سیستم کنترلی کوادروتور رو بررسی کنم به سوالی برخورد کردم که گفتم از شما بپرسم. ممنونم میشم که جواب بدین.
1) روش بیانشده برای کنترل مود لغزشی که در مقالات وجود دارد برای یک مسئله ساده (SISO) بیانشده است. در حالی که این سیستم کوادروتور MIMO هست. این رو چطور میشه توجیه کرد.
مهندس بابایی
با سلام
اگر دقت کرده باشید اکثر مقالات با محوریت کوادروتور که از روش مد لغزشی برای کنترل کوادروتور استفاده نموده اند، با دید یک سیستم چند متغیره این طراحی رو انجام داده اند. ما یک سطح اسلاید تعریف نمی کنیم، یا یک کنترل کننده طراحی نمی کنیم، بلکه چند سطح اسلاید و چند کنترلر مجزا برای هر یک از متغیرهای اصلی سیستم کوادروتور تعریف می کنیم که این موضوع از ماهیت های اصلی کنترلر مد لغزشی هست که فقط برای یک سیستم تک ورودی تک خروجی استفاده نمی شه، بلکه مد لغزشی چند سطحی خواهیم داشت که برای سیستم های چند ورودی-چندخروجی قابل اجراست که در سیستم کوادروتور هم دقیقا همین موضوع اجرا شده است.
موفق باشید.
ن
سلام، خانم مهندس چرا هیچ ایمیلی از شما نیست؟!
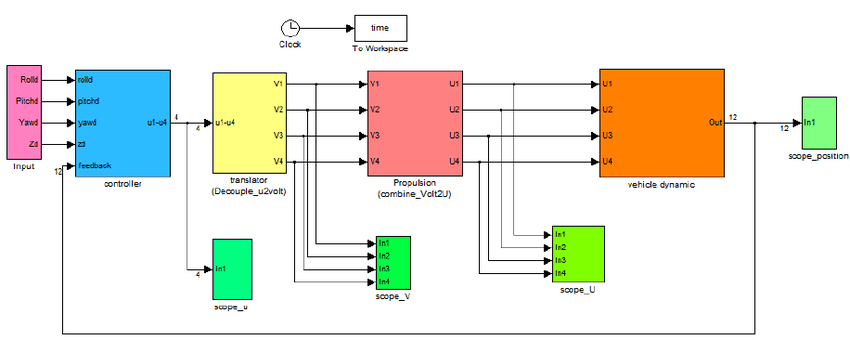
راجع به شبیه سازی کاش با سیمولینک انجام میدادید…ممکن هست خیلی زود فایل سیمولینک را با توضیح بگذارید؟
مهندس بابایی
با سلام
خیر. متاسفانه فرصتی برای شبیه سازی بر اساس سیمولینک نیست.
ایمیل: rose.babaie@gmail.com
موفق باشید.
محمد عبداله زاده
سلام خاتم دکتر ببخشید ی سوال دیگه خانم دکتر طبق فرمایشاتتون بر روی سیستم تابع هزینه قبلی نوشتم با انتخاب بعضی ضرایب به صورت ثابت خانم دکتر الان ج درستی میده ولی U در ابتدای ضربه سریع به 150 به -150 داره و بعد فورا مقدار 3.5 پایدار میشه به صورت سریع خانم دکتر در حالی که در smc این چنین حالتی نداریم ولی هم S مقدارش صفر میشه و هم x مقدار پایدار میگیره هر چی تلاش کردم تا مقدار U محدود کنم نتونستم شما راهی بنظرتون میرسه والا هنوز نمی دونم که این ج که گرفتم ج درست هست یا نه ممنون میشم اگه اطلاعاتی دارید بهم بدید با تشکر و خیلی ممنون بابت اموزش های بسیار عالیتون
مهندس بابایی
با سلام
دوست عزیز دقت کنید که خیلی از این سوالاتی که شما تا الان پرسیدید و من پاسخ دادم، قطعا اگر با استاد راهنما و مشاور پایان نامتون هم صحبت می کردید چون شناخت کافی روی سیستم شما دارند می تونستند شما رو راهنمایی کنند.
اما برای اینکه مشکل شما حل بشه، به نکته ای که در ادامه میگم دقت کنید:
ما در عمل (real application) نباید یک ضربه ناگهانی با یک دامنه نامتعارف مثل مال شما (150) در ورودی کنترلی خودمون داشته باشیم. بنابراین باید به دنبال حذف اون باشیم. برای این کار باید ضریب کنترلی مربوط به پارامتر U خودمون رو تا حد امکان کاهش بدیم تا به U فرصت کافی بدیم تا بتونه خودش رو صاف کنه و اون ضربه ناگهانی از بین بره. بنابراین بینید کدوم پارامترها و ضرایب روی U شما تاثیر مستقیم دارند، اونها رو شروع به کاهش دادن بکنید تا کم کم ضربه ایجاد شده حذف بشه یا به حداقل ممکن برسه.
و اینکه چرا نتایج شما درست نباشه؟ اگر با نکاتی که اموزش دادم طراحی رو انجام دادید و به نتایجی که ذکر کردید رسیدید، قطعا پاسخ های شما صحیح است. فقط نکته اخری رو هم که بهتون گفتم رو هم حتما اعمال کنید.
موفق باشید.
ن
سلام. الگوریتم ژنتیک برای بهینه سازی پارامترهای Q در کدام آموزش هست؟ تو بخش دوم جلسه سیزده توضیح دادید که برای انتخاب پارامترهای Q به صورت اسکالر از الگوریتم ژنتیک استفاده کردید و اینکه قبلا راجع بهش گفتید…
مهندس بابایی
با سلام
جلسه دهم، به موضوع الگوریتم ژنتیک اختصاص دارد.
موفق باشید.
ن
متشکرم. موفق باشید
مهندس بابایی
پایدار باشید.
محمد عبداله زاده
%J=Q(1,1)*(x1)*(x1)’+Q(1,1)*(x3)*(x3)’+Q(1,1)*(x5)*(x5)’+Q(1,1)*(2-x7)*(2-x7)’…..
%+Q(1,1)*(2-x9)*(2-x9)’+Q(1,1)*(2-x11)*(2-x11)’+R(1,1)*u1*u1’+R(2,2)*u2*u2’+R(3,3)*u3*u3’+R(4,4)*u4*u4′;
با سلام مجدد خانم دکتر ببخشید من طبق فرمایشاتتون که عمل کردم بر روی شناور مغناطیسی sdre پیاده سازی کردم و ج گرفتم فقط بهینه سازی مونده که هرچی می کنم الگوریتم بهینه سازی ج نمیده که همون پیام که خدمتتون نشون دادم رو میده و یا اینکه ج میده ج درست نمیده طبق اموزش خوبی که در الگوریتم ژنتیک ارائهدادین جلو رفتم و بر روی اسلایدینگ هم پیاده سازیش کردم خانم دکتر ببخشید میشه کمکم کنید راهنماییکنید چرا تابع هزینه به صورت بالا اوردین که در اون عناصر ماتریسQ در تابع هزینه اوردین ممنون میشم راهنماییم کنید بازم بابت اموزش های خوبتون تشکر می کنم ایشاللههمیشه سرفراز و سر بلند باشین با تشکر
تابع هزینه که منتعریفکردم به صورت زیر است
J=30*(Q(1,1)*(x1s-.004)*(x1s-.004)’)+(Q(3,3)*((x3s-x3sd)*(x3s-x3sd)’))+(Q(2,2)*((x2s)*(x2s)’))+(3*(R1*(utot)*(utot’)))
با تشکر
مهندس بابایی
با سلام
ببینید این تابع هزینه ای که می فرمایید مختص سیستم کوادروتور من هست و هر کدوم از دوستان می تونند یک تابع هزینه متفاوت تعریف کنند. اینکه چرا از Q استفاده کردم به خاطر این بود که می خواستم از یک ماتریس وزن دهی وابسته به حالت در تابع هزینه استفاده کنم. اما شما دقت کنید که لزوما این تابع هزینه ممکنه برای سیستم شناور مغناطیسی شما درست جواب ندهذ. بنابراین اگر می خوایید با الگوریتم ژنتیک ضرایب رو بهینه سازی کنید همون تابع هزینه ای که در جلسه اموزشی به شما اموزش دادم رو استفاده کنید. یعنی ماتریس های R و Q رو از حالت وابسته به حالت خارج کنید و اونها رو به صورت اسکالر تعریف کنید و در مرحله اول هر دوی اونها رو 1 قرار بدید و خروجی بگیرید. دقت کنید این تابع هزینه هیچ ارتباطی به تابع هزینه ای که در بخش SDRE تعریف کردیم ندارد و می تواند کاملا متفاوت از ان تعریف شود.
موفق باشید.
محمد عبداله زاده
سلام دوباره خدمتون خانم دکتر ببخشید مرتب مزاحمتون میشم خانم دکتر ببخشید من رو سیستم شناور مغناطیسی که پیاده می کنم وقتی محدوده تغییرمی دم ضرایب که اعمال می کنم خانم دکتر ج میده ولی error درست کم نمی کنه ممنون میشم راهنماییم کنید بتونم درست ضرایب اعمال کنم
مهندس بابایی
با سلام
اگر الان مثل قبل fitness function شما بی نهایت نمیشه، پس شما مرحله اول کار رو جلو رفتید و به درستی کنترل کننده رو روی سیستمتون پیاده سازی کردید. حالا میزان خطای شما مطلوب نیست و می خوایید اون رو کاهش بدید که این مرحله دوم کار شماست. ببینید در این مرحله خیلی مهم هست که شما روی مدلسازی و ساختار دینامیکی سیستمتون اشراف کامل داشته باشد چراکه باید وابستگی پارامترهای دینامیکی سیستمتون رو به کنترل کننده ای که طراحی کردید کامل بدونید، که مثلا با تغییر کدوم پارامتر در کنترل کننده، کدوم متغیر حالت سیستم شناور مغناطیسی شما تحت تاثیر قرار میگیره. من دانش زیادی نسبت به ساختار دینامیکی شناور مغناطیسی ندارم که بتونم مستقیما راهنماییتون کنم. چون تخصص من در زمینه کنترل کوادروتور های سینگل و همکار هستش. اما می تونم اینطور راهنماییتون کنم که روی وزن ماتریس های R و Q کار کنید چرا که ما این ماتریس ها رو در روش SDRE ، وابسته به حالت تعریف می کنیم. بنابراین هرجا میزان خطا در هر متغیری مطلوب شما نیست برید میزان وابستگیش رو در R و Q تغییر بدبد تا به یک حد تعادل برسید.
موفق باشید.
محمد
سلام خانم دکتر روزتون بخیر ببخشید مرتب مزاحمتون میشم خانم دکتر من با استفاده از اموزش های مفیدتون تونستم ROSMC رو سیستم خودم که شناور مغناطیسی بود پیاده سازی کنم فقط ی مشکل دارم تنظیم ضریب ها هستش ERROR میده با استفاده از ژنتیک می خوام بزنم نمی دونم چرا تابع هزینه یل بی نهایت میشه . یا معادله همیلتون در حل نمی تونه حل کنه ممنون میشم راهنمایی بفرمایید چی کار کنم
Optimization running.
Error running optimization.
Unable to solve the specified Riccati equation because the Hamiltonian spectrum is too close to the imaginary axis.
مهندس بابایی
با سلام
خواهش می کنم. ببینیداین خطا نشان می دهد برنامه متلب شما قادر به حل معادله ریکاتی نیست. بنابراین باید روی پارامترهای مرتبط با SDRE که به صورت دستی تنظیم کردید متمرکز شوید. مثلا تنظیم گاما صفر و گامایک به شدت در حل معادله ریکاتی تاثیرگذار هستند. این دو پارامتر را حدالمقدور بسیار کوچک انتخاب کنید. همچنین گذاشتن قدرمطلق برای برخی متغیرها و پارامترها در طراحی ماتریس G1 و R و Q را طبق توضیحاتی که در فیلم آموزش عرض کردم را نیز فراموش نکنید.
e_e
سلام خانم دکتر سوال من این است که اگر بخواهم الگوریتم ژنتیک را در سیمولینک بکار برم به چه شکلی می توان انجام داد چه بصورت استفاده از optimtool و یا نوشتن کد ga ممنمونمی شم راهنمایی کنید.
مهندس بابایی
با سلام
در این مجموعه اموزشی هیچ یک از برنامه هاب متلب بر اساس سیمولینک نیستند و تماما بر اساس کد نویسی اموزش داده شده اند، بنابراین هیچ اموزشی در بخش سیمولینک نداریم. برای کاربرد ژنتیک در سیمولینک می توانید به اموزش های سایر اساتید در سایت مراجعه بفرمایید و همچنین کد های مربوط به GA ، گاها به صورت اماده و رایگان در نت موجود هستند و می توانید با جستجو در نت بعضی از نمونه ها را دریافت کنید.
موفق باشید.