در این جلسه سیستم کوادروتور از لحاظ سخت افزاری و عملکردی به طور کامل توضیح داده می شود. این جلسه تحت عنوان پیش درامدی بر کوادروتور ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
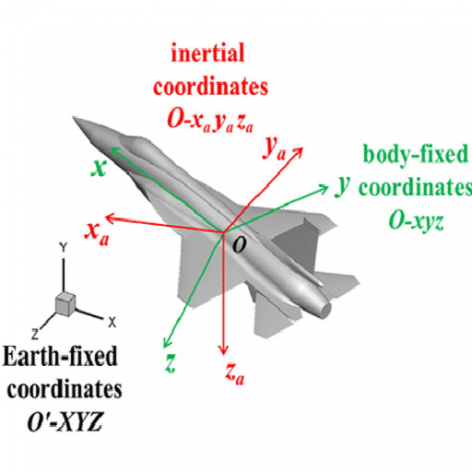
در این جلسه مفهوم پایه ای عملکرد سیستم کوادروتور، معرفی محورهای فرضی حاکم بر سیستم، نحوه انتقال از فریم بدنه به فریم اینرسایی و بالعکس و همچنین نحوه استخراج معادلات دینامیکی موتورهای براشلس DC مورد استفاده در سیستم کوادروتور به طور کامل توضیح داده می شود. . این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (1) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی کوادروتور شامل متغیرهای حالت سیستم به طور کامل بررسی می شود. در ادامه معادلات دینامیکی حاکم بر سیستم کوادروتور از طریق دو روش نیوتن-اویلر و همچنین اویلر-لاگرانژ به صورت جداگانه و به تفصیل توضیح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (2) ارایه می شود.
مدت زمان: 53 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی سیستم کوادروتور از منظری دیگر مورد بررسی قرار می گیرد و مدلسازی سیستم کوادروتور بر مبنای تعاریف علم سینماتیک و علم دینامیک انجام و معادلات ریاضی سیستم استخراج می گردد . در ادامه نیروها و گشتاورهای وارد بر سیستم کوادروتور به طور کامل توضیح داده می شوند و در نهایت نحوه به دست اوردن معادلات فضای حالت سیستم شرح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (3) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به علم ایرودینامیک پرواز پرداخته می شود. نیروهای ایرودینامیکی به طور کامل توضیح داده می شوند و سپس ایرودینامیک عمودپروازها به طور اختصاصی برای سیستم کوادروتور مطرح و روابط ان استخراج می گردد. در ادامه نحوه محاسبه سرعت و مسیر باد که مهمترین عامل اغتشاش خارجی بر هم زننده تعادل این سیستم پرنده می باشد، مطرح می گردد. این جلسه تحت عنوان ایرودینامیک پرواز (1) ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
این جلسه در ادامه جلسه پنجم ، به تکمیل روابط ریاضی ایرودینامیک پرواز سیستم کوادروتور می پردازد. در ادامه روش های محاسبه نیروی دراگ جهت تخمین بردار و مسیر باد به طور کامل شرح داده می شوند و در نهایت معادلات فضای حالت سیستم کوادروتور به همراه اثرات ایرودینامیکی استخراج می گردند. این جلسه تحت عنوان ایرودینامیک پرواز (2) ارایه می شود.
مدت زمان: 50 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به ساختار کنترلی سیستم کوادروتور پرداخته می شود و تمامی لایه های کنترلی به همراه بلوک دیاگرام انها و ارتباط بین هریک از این لایه های کنترلی به طور کامل مطرح می گردد . دانش کسب شده در این جلسه پیش زمینه طراحی هر نوع کنترلر دلخواه برای این سیستم پرنده می باشد.
مدت زمان: 66 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه فیلتر کالمن پیوسته توسعه یافته به عنوان یک مشاهده گر و تخمین زننده مطرح در سیستم های غیر خطی معرفی می گردد و در نهایت نحوه تخمین متغیرهای حالت سیستم کوادروتور بر مبنای این نوع فیلتر خاص به طور کامل توضیح داده می شود..
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
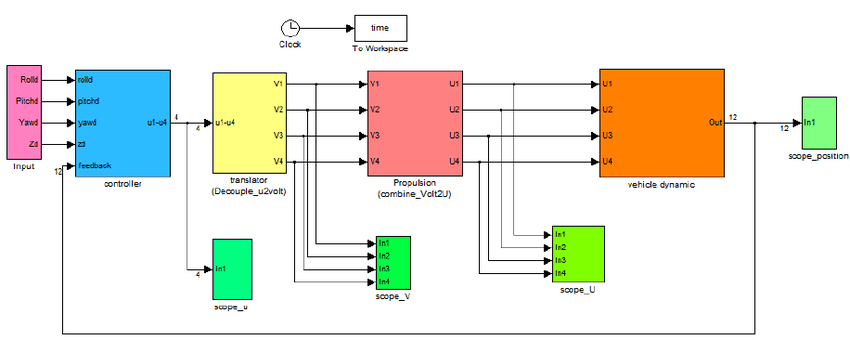
در این جلسه نحوه پیاده سازی روش کنترلی مد لغزشی بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 72 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720P
در این جلسه نحوه پیاده سازی الگوریتم بهینه سازی ژنتیک به عنوان یک روش تحلیلی ، جهت محاسبه دقیق تری از پارامترهای کنترل کننده مد لغزشی اموزش داده می شود.
مدت زمان: 74 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی فیلتر کالمن پیوسته توسعه یافته ، جهت تخمین متغیرهای حالت سیستم کوادروتور در نرم افزار متلب اموزش داده می شود.
مدت زمان: 47 دقیقه
فایل های همراه: فایل تصویری ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی کنترل کننده پسگام (Backstepping) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 57 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه اموزشی ، نحوه پیاده سازی یک کنترل کننده مقاوم و بهینه ترکیبی(ROSMC) بر مبنای معادلات ریکاتی وابسته به حالت ( SDRE) تحت عنوان (Robust Optimal Sliding Mode Control based on SDRE) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب در چهار بخش جداگانه به صورت زیر اموزش داده می شود.
مدت زمان جلسه :4 ساعت و30 دقیقه
فایل های همراه جلسه: فایل تصویری ، فایل پاورپوینت درس ، ، m-file های نرم افزار متلب
بخش اول :
طراحی قانون کنترل بهینه مقاوم با استفاده از کنترل کننده مد لغزشی بر اساس معادلات
ریکاتی وابسته به حالت
مدت زمان بخش اول : 2 ساعت و 5 دقیقه
فایل های همراه بخش اول: فایل تصویری ، فایل پاورپوینت درس ، فایل PDF پاورپوینت درس
پیش نمایش جلسه اول
بخش دوم:
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Point to Point
مدت زمان بخش دوم : 1 ساعت و 5 دقیقه
فایل های همراه بخش دوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش دوم
بخش سوم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Trajectory Tracking
مدت زمان بخش سوم : 35 دقیقه
فایل های همراه بخش سوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش سوم
بخش چهارم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
جهت محاسبه خطای Minimum Mean Square Error
مدت زمان بخش چهارم 45 دقیقه
فایل های همراه بخش چهارم : فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش چهارم
در این جلسه اموزشی ، نحوه پیاده سازی کنترل کننده گام به عقب(Backstepping) به صورت ترکیب با فیلتر کالمن توسعه یافته پیوسته (Extended Kalman Bucy Filter) در حالت ردیابی یک مسیر از پیش تعیین شده (Trajectory Tracking) ، بر روی سیستم کوادروتور به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان جلسه :45 دقیقه
فایل های همراه جلسه: فایل تصویری ، m-file های نرم افزار متلب
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم




محمد
با سلام و ارادت
خانوم دکتر دوتا سوال از جنابعالی دارم ممنون میشم توضیح بفرمایید
اولین سوال مرتبط با شبیه سازی اسلایدینگ مد هست که چه در شبیه سازیای اینجانب چه شبیه سازی جنابعالی مشاهده شده که تغییر dt مثلا از 0.1 تا 0.00001 میتواند جوابهای مختلفی در خروجی نمایش دهد در شبیه سازی قسمت 6 شبیه سازی set point برای مثال اگر dt یک دهم کمتر یا بیشتر شود پاسخ ها عوض میشود این موضوع در شبیه سازیای اینجانب هم بوده این موضوع از غیرخطی شدید ناشی شده؟ این موضوع در پیاده سازی عملی در نظر گرفته میشود؟ چرا با وجود این موضوع در شبیه سازی های مقالات به dt اشاره نمیشود چون این موضوع به شدت تاثیر گذار است…
سوال دوم از حضور استاد گرامیم دارم این است که در بحث روئیتگر برای کوادروتورها حداقل تعداد خروجیایی که استفاده شده و شما تا بحال در مطالعاتتون دیدید چطور بوده؟ ممنون میشم یه توضیحی با توجه به آشناییتون نسبت به سیستم دارید بفرمایید که چه حالتهایی با استفاده از کدام حالتها روئیت پذیر میتوانند باشند
ممنونم با تشکر
مهندس بابایی
سلام بر شما
بله یکی از علل ان غیرخطینگی های موجود در ساختار سیستم است. معمولا این موضوع روتین هست یعنی بسته به شرایط مساله، نویسنده میزان ان را بالا و پایین می کند تا به جواب مطلوب دست یابد و تقریبا تمام کسانی که روی بحث کنترل اینگونه سیستم ها کار می کنند با ان اشنا هستند و دیگر در مقالات عنوان نمی شود و بله این موضوع در بحث عملی نمود پیدا می کند اما من به شخصه عملی کار تکردم. همچنین دقت کنید که اگر این موضوع مرتبط با بحث تخمینگر باشد ، به علت انکه شرایط کنترل کننده منطبق با عملکرد تخمینگر می شود معمولا میزان dt را در مقالات ذکر می کنند، یا حداقل داوران حرفه ای مجلات معتبر، این موضوع را از نویسنده می خواهند که توضیح دهند. برای اثبات این موضوع توجه شما را به Remark.1 یکی از مقالات خودم درادامه جلب می کنم:
https://miscj.aut.ac.ir/article_3113_30f939999e6fd64527f20bc9d472ebea.pdf
در مورد سوال دوم شما نیز من تا به امروز فقط روی بحث تخمین متغیرها کار کردم و وارد موضوع تحلیل عملکرد رویتگرها بر سیستم کوادروتور نشده ام.
موفق باشید.
محمد
ممنونم از شما استاد گرامی
مقاله ی ضمیمه شده ی جنابعالی را دیدم و بسیار اشاره به این موضوع برای بنده جالب بود لطف کردید
خانوم دکتر در مبحث تخمین و طراحی تخمینگر برای کووادروتور ،ممنون میشم اگر مدل یا فرم کلی مدل غیرخطی رویتگر که منطبق بر مدل کووادروتور هست و معمولادر نظر گرفته میشود رو بیان کنید
مهندس بابایی
چون روی این موضوع به صورت جامع کار نکردم بنابراین منبع مستندی نمی توم به شما ارایه کنم. دقت کنید در رابطه با این موضوعات خیلی مهم هست که منابع شما کاملا به روز باشند چون افراد مختلف روز به روز در حال ارایه مقالات جدید با روش های نوین در رابطه با موضوع کوادروتور هستند و گاهی می بینیم که مدل های موجود در برخی مقالات بعضا چند سال بعد کاملا نقض می شوند.بنابراین سعی کنید از مقالات به روز در پایگاه های مهم همچون scopus و web of science و google scholar استفاده کنید.
حمید
سلام
اگه ممکنه در خصوص استفاده از داده های ژیسکوپ و شتاب سنج و روش بدست اوردن پارامترهای سیستم از این حسگرها که در نهایت بعنوان ورودی فیلتر کالمن استفاده خواهد شد منابعی رو معرفی بفرمایید.
تمام بخش های آموزش رو نگاه کردم ولی در این مورد مطلبی رو ندیدم. اگه در این مورد مطالبی هست محل شو بفرمایید تا مجدد مطالعه کنم. سپاسگزارم.
مهندس بابایی
سلام بر شما
تمرکز این مجموعه اموزشی بر مسایل کنترلی به صورت تیوری می باشد ، به همین علت از بحث در رابطه با موضوع ژایروسکوپ و شتاب سنج که عمدتا در طرح های عملی کوادروتور به کار گرفته می شوند، خودداری شده است. بنابراین شما می بایست به لیست مخازن دیجیتالی دانشگاه های معتبری که در زمینه ساخت کوادروتور فعالیت دارند مراجعه کنید. از اجمله این دانشکاه ها می توان به لیست زیر اشاره نمود:
و…… University of British Columbia ، University of Aalborg / Section for Automation & Control ، University of California – Santa Cruz ، University of Pennsylvania
موفق باشید.
محمد
https://ganj.irandoc.ac.ir/#/articles/f6c2bd638d6f4b0678832f1d40a711e0
خانم دکتر بی زحمت ببیتید هیچ راهنما و یا …. نیست بتونیم قسمتی رو دسترسی داشته باشیم بی زحمت قسمت کالمن ekbf فقط در حد چند صفحه که چیست بتوم بخونم و در کنار مدل خودم بیارم لازم دارم سو تفاهم نشه که من با داشتن شبیه سازی های خوبتون که زحمت توضیح دادن کشیدین نیاز به پایان نامتون دارم تا پایان نامه شمارو راحت کپی کنم فقط به چند صفحه کالمن احتیاج دارم تا بخونم و در کنار توضیحات خودم بیارم ضمنا حتما هم در منابع ذکر می کنم من هم روی سیستم خودم ekbf زدم با تشکر
مهندس بابایی
دسترسی به متن پایان نامه ها از طریق ایرانداک کاملا شدنی است. باید ابتدا عضو شوید و بعد در خواست پایان نامه کنید.لطفا فقط از همین طریق دریافت نمایید. چون امکان ایمیل فایل پایان نامه مقدور نمی باشد.
موفق باشید.
mohammad
سلام و روز بخیر خانم دکتر خسته نباشید ببخشید ی سوال داشتم خانم دکتر پایان نامه شما رو از کجا میشه تهیه کنیم و مطالعه کنیم؟ ممنون میشم فایل pdf در اختیارمون قرار بدین با تشکر
مهندس بابایی
با سلام
تمام پایان نامه ها در سایت ایرانداک موجود هستند.
محمد
سلام خانم دکتر ببخشید ی سوال دیگه داشتم در قسمت مقایسه 2 روش در حالت poit to point که زحمت کشیدیدن توضیح دادین ضرایب که برا حالت smc بدون sdre به دست اورده بودین منظورم landa می باشد این ضرایب نیز بهینه بودن؟؟ و خانم دکتر ببخشید من در سیستم خودم تلاش کنترلی ی ضربه تا 40 داشت و بعد سریع به سمت 5 می ره ممنون میشم راهنماییم کنید که بدونم چه کار می تونم رو سیستم انجام بدم طبق فر مایشاتتون رو سیستم خودم ماتریس Q رو به متغیری که error داره وابسته کردم r رو ثابت و متغیر گرفتم و dt تغییر دادم خانم دکتر نمی دونم چرا از ژنتیک استفاده می کنم برای R و Q سیستم ناپیدار میشه و فورا الگوریتم ژنتیک متوقف میشه
مهندس بابایی
سلام بر شما
همانطور که عرض کردم من اصلا سیستم شما نمی دونم چی هست، و چه متغیرهایی داره، چندتا کنترلر داره و اینکه اصلا ایا برنامه رو درست نوشتید یا خیر چون اصلا برنامه شما رو ندیدم. بنابراین واقعا نمی تونم بیشتر از این راهنماییتون کنم. بله در برنامه های من اکثر ضرایب با روش بهینه سازی الگوریتم ژنتیک به دست امده اند. اینم که می فرمایید ضربه وجود داره باید تایم رو بیشتر کنید که فرصت کافی به نیروی کنترلی داده بشه تا بتونه خودش رو صاف کنه. و در مورد R و Q هم لزوما نباید با ژنتیک محاسبه بشن، می تونید به مقالات مرتبط با سیستمتون مراجعه کنید و ببینید در موارد مشابه این مقادیر ماتریس رو چند گرفتند، شما هم به اون مقادیر نزدیک بشید.
موفق باشید.
احمدی
باسلام و تشکر
میشه لطفا برای اغتشاش باد، چندتا منبع معرفی کنید؟
سپاس
مهندس بابایی
سلام بر شما
قبلا عرض کردم منابع رو چه جوری پیدا کنید. حالا یک ایمیل به من بزنید تا بررسی کنم.
محمد
سلام خانم دکتر خوب هستین ببخشید ی سوال دیگه داشتم خانم دکتر وقتی که sdre با sliding ترکیب می کنم و رو سیستم پیاده می کنم خانم دکتر سیستم مقدار 22mm. ارور داره و اینکه هر چه Q دست کاری می کنم ج بهتر از این نمیده یا اگه بخئواد بهتر بشه تلاش گنترلی ریپل اولیش خیلی زیاد میشه ولی در سیستم که شما شبیه سازی کردین دیدم error نداشتین dt رو هم خیلی کوچک کردم نتیجه نداشت و اگه مقدار R که برا سیستم من 1در 1 هستش رو خیلی کم بگیرم u مقدار ریپل زیادی می گیره ممنون میشم راهنمایی کنید برا انتخال Q و R
مهندس بابایی
سلام بر شما
ببینید من اصلا روی دینامیک سیستم خاص شما هیچ گونه اشرافی ندارم. بنابراین همون تغییراتی که قبلا عرض کردم رو باید اعمال کنید. اگر میبینید باز هم خطا داره باید برید سراغ intraction هایی که بین متغیرهای سیستمتون وجود داره. اینکه مثلا خطا روی کدوم متغیر بیشتره و یا کمتره. سعی کنید ماتریس هاتون رو به اون متغیر های خاص وابسته کنید تا اثرشون رو کم و زیاد کنید. همچنین باید یک محدوده خطا هم قطعا برای سیستم شما تعریف شده باشه که ممکنه مثلا این مقدار خطایی که شما به دست اورده باشید خیلی هم برای سیستم شما نامطلوب نباشه. بنابراین چون من شناختی روی سیستم شما ندارم، بیشتر از این نمی تونم راهنماییتون کنم.
موفق باشید.
علی
من چند بار خوندم و مرور کردم. ولی متوجه نمیشم چرا در روش جدید که سطح اسلاید جدیدی در نظر میگیرید و حتی مشتق اون رو محاسبه و Ueq بدست میارید بعد میاید تو شبیه سازی مثل قبل سطوح رو تعریف میکنید و حتی توی G از اون استفاده میکنید!!!! لطفا یک توضیح شفاف لطف بفرمایید . اینکه برخی فرمولها به یکدفعه ظاهر میشوند باید مبنایی پشتشون باشه لطف کنید و این رو بگید
مهندس بابایی
سلام بر شما
اینکه اصرار دارم که باید مفهوم موضوع رو درک کنید به خاطر همین اشتباهات هست. ببینید دوست عزیز خوب دقت کنید:
انچه که شما در اسلاید 26 پاورپوینت به عنوان سطح اسلاید بهینه می بینید در واقع یک تعریف و فرمول کلی از بهینه سازی سطوح لغزش روش اسلایدینگ برای تمام Case Study ها با استفاده از متد SDRE هست نه اینکه برای سیستم کوادروتور ما باشد! بنابراین شما نباید که مستقیما در برنامه متلب از اون استفاده کنید.مگه ما در اونجا فعلا حرفی از نوع سیستم زدیم؟ خیر، فقط داریم یاد میدیم یک سطح اسلاید بهینه وابسته به معادلات ریکاتی، چگونه تعریف می شود. حال انکه سیستم شما هرچیزی می تواند باشد ، مثلا یک ربات زیر دریایی، یک شناور مغناطیسی، یک کوادروتور ، یک موشک و ……
بنابراین هر پژوهشگر با توجه به مدل سیستم خودش، سعی می کنه به نوعی سطوح اسلایدی رو برای سیستمش تعریف کنه که در نهایت در جایگذاری Udis و مجموع ان با Ucont به همان تعریف Uequ برسد که از مشتق گیری Sopt به دست امده بود که در واقع همان uu تعریف شده توسط ما در برنامه متلب است.
همچنین هیچ فرمولی یکدفعه ظاهر نشده است، تمام فرمول ها رفرنس مقاله ای و یا پایان نامه ای دارند، بنابراین مسلم هست که وقتی این موضوع توسط من اموزش داده شده ، مرجع شما نیز در این موضوع مقاله من خواهد بود چرا که ایده این نوع ترکیب SMC و SDRE بر روی سیستم کوادروتور توسط من انجام شده که مقاله مربوط به اون هم چند سال پیش به چاپ رسیده، که اگر دقت کنید در انجا نیز خود شخص من هم به مقالات پیشین در این زمینه مرجع دهی کرده ام.
پایدار باشید.
علی
سلام مجدد خدمت خانم بابایی
در اسلاید ها سطح لغزش جدید Sopt جور دیگری نسبت به قبل گرفته شده حال آنکه در برنامه متلب نقطه به نقطه سطوح لغزش در خطهای 133 تا 139 مثل قبل تعریف شده!!! چرا اینطور هستش؟
مهندس بابایی
با سلام
این سوالی که الان شما مطرح کردید نشان می دهد اصلا مفهوم این جلسه اموزشی رو به درستی درک نکردید. این جلسه اموزشی 4 ساعته رو یکبار دیگه این بار با دقت بیشتری ملاحظه کنید.تمام نکات لازم و کافی در فیلم اموزشی مطرح شده است.
احمدی
باعرض سلام و احترام
خیلی ممنون از ویدیوهای عالی آموزشی کوادروتور
میشه لطف کنین چندتا منبع برای قسمت آیرودینیک کوادروتور و اندازه گیری سرعت باد و مسیر باد
و منبع برای قسمت استخراج معادلات فضای حالت سیستم کوادروتور به همراه اثرات ایرودینامیکی
بفرمایین
و همچنین اگر لینک مقالات خودتون را هم بفرمایین
خیلی ممنون میشم
باتشکر
مهندس بابایی
سلام بر شما
نظر لطف شماست.
ببینید بحث ایرودینامیک پرواز و دینامیک سیستم کوادروتور رو من از پایان نامه هایی که رو این زمینه کار شده بود استفاده کردم که الان در ارشیو کامپیوترم ندارم چون برای چند سال پیش هست. اما چندتا نکته رو خدمت شما عرض کنم. ببینید بحث استخراج دینامیک و ایرودینامیک سیستم که من با جزییات کامل در فیلم های اموزشی هم توضیح دادم ر باید در پایان نامه ها به دنبال اون باشید چراکه معمولا بحث گسترده ای هست و در مقالات اون رو نمیارن و فقط به مقالات پیشین ارجاع میدن. یعنی اگر کسی هم در مقاله بیاره، داور ازش می خواد که اون رو حدف کنه و فقط به فرمول های نهایی اشاره کنه و مابقی رو رفرنس دهی کنه. حالا شما باید در لیست دسترسی های ازاد منابع که من اموزشش رو هم در سایت قرر دادم به دنبال این پایان نامه ها در مخازن دیجیتالی دانشگاه های معتبر دنیا که روی این زمینه زیاد کار کردند مثل cornel university, Peensylvania university ,…. باشید که هم مطالب جامع تر و هم جدیدتر رو برای کارتون پیدا کنید. این مخازن شامل repository , arXive, Coursera , ……میشه.
در ادامه نیز من لینک برخی از مقالاتم رو براتون قرار میدم:
https://journals.sagepub.com/doi/full/10.1177/0142331216640600
https://ieeexplore.ieee.org/document/7985155
http://ijeee.iust.ac.ir/article-1-1258-en.html
https://miscj.aut.ac.ir/article_3113.html
http://psc-ir.com/cd/2016/papers/1421.pdf
پایدار باشید.