در این جلسه سیستم کوادروتور از لحاظ سخت افزاری و عملکردی به طور کامل توضیح داده می شود. این جلسه تحت عنوان پیش درامدی بر کوادروتور ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
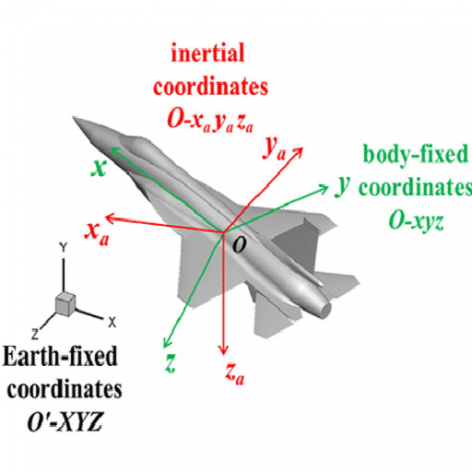
در این جلسه مفهوم پایه ای عملکرد سیستم کوادروتور، معرفی محورهای فرضی حاکم بر سیستم، نحوه انتقال از فریم بدنه به فریم اینرسایی و بالعکس و همچنین نحوه استخراج معادلات دینامیکی موتورهای براشلس DC مورد استفاده در سیستم کوادروتور به طور کامل توضیح داده می شود. . این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (1) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی کوادروتور شامل متغیرهای حالت سیستم به طور کامل بررسی می شود. در ادامه معادلات دینامیکی حاکم بر سیستم کوادروتور از طریق دو روش نیوتن-اویلر و همچنین اویلر-لاگرانژ به صورت جداگانه و به تفصیل توضیح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (2) ارایه می شود.
مدت زمان: 53 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی سیستم کوادروتور از منظری دیگر مورد بررسی قرار می گیرد و مدلسازی سیستم کوادروتور بر مبنای تعاریف علم سینماتیک و علم دینامیک انجام و معادلات ریاضی سیستم استخراج می گردد . در ادامه نیروها و گشتاورهای وارد بر سیستم کوادروتور به طور کامل توضیح داده می شوند و در نهایت نحوه به دست اوردن معادلات فضای حالت سیستم شرح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (3) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به علم ایرودینامیک پرواز پرداخته می شود. نیروهای ایرودینامیکی به طور کامل توضیح داده می شوند و سپس ایرودینامیک عمودپروازها به طور اختصاصی برای سیستم کوادروتور مطرح و روابط ان استخراج می گردد. در ادامه نحوه محاسبه سرعت و مسیر باد که مهمترین عامل اغتشاش خارجی بر هم زننده تعادل این سیستم پرنده می باشد، مطرح می گردد. این جلسه تحت عنوان ایرودینامیک پرواز (1) ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
این جلسه در ادامه جلسه پنجم ، به تکمیل روابط ریاضی ایرودینامیک پرواز سیستم کوادروتور می پردازد. در ادامه روش های محاسبه نیروی دراگ جهت تخمین بردار و مسیر باد به طور کامل شرح داده می شوند و در نهایت معادلات فضای حالت سیستم کوادروتور به همراه اثرات ایرودینامیکی استخراج می گردند. این جلسه تحت عنوان ایرودینامیک پرواز (2) ارایه می شود.
مدت زمان: 50 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به ساختار کنترلی سیستم کوادروتور پرداخته می شود و تمامی لایه های کنترلی به همراه بلوک دیاگرام انها و ارتباط بین هریک از این لایه های کنترلی به طور کامل مطرح می گردد . دانش کسب شده در این جلسه پیش زمینه طراحی هر نوع کنترلر دلخواه برای این سیستم پرنده می باشد.
مدت زمان: 66 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه فیلتر کالمن پیوسته توسعه یافته به عنوان یک مشاهده گر و تخمین زننده مطرح در سیستم های غیر خطی معرفی می گردد و در نهایت نحوه تخمین متغیرهای حالت سیستم کوادروتور بر مبنای این نوع فیلتر خاص به طور کامل توضیح داده می شود..
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
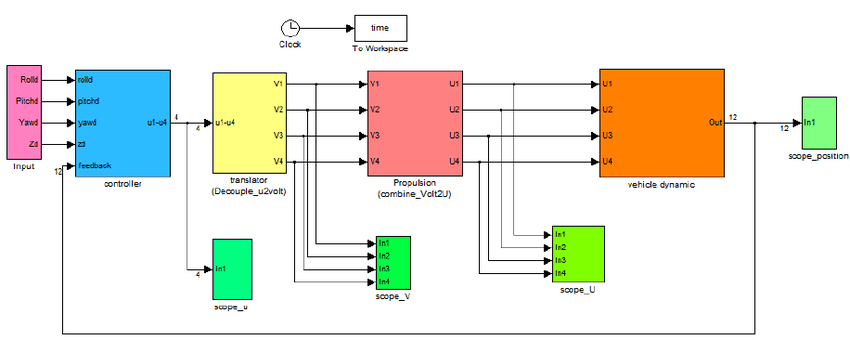
در این جلسه نحوه پیاده سازی روش کنترلی مد لغزشی بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 72 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720P
در این جلسه نحوه پیاده سازی الگوریتم بهینه سازی ژنتیک به عنوان یک روش تحلیلی ، جهت محاسبه دقیق تری از پارامترهای کنترل کننده مد لغزشی اموزش داده می شود.
مدت زمان: 74 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی فیلتر کالمن پیوسته توسعه یافته ، جهت تخمین متغیرهای حالت سیستم کوادروتور در نرم افزار متلب اموزش داده می شود.
مدت زمان: 47 دقیقه
فایل های همراه: فایل تصویری ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی کنترل کننده پسگام (Backstepping) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 57 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه اموزشی ، نحوه پیاده سازی یک کنترل کننده مقاوم و بهینه ترکیبی(ROSMC) بر مبنای معادلات ریکاتی وابسته به حالت ( SDRE) تحت عنوان (Robust Optimal Sliding Mode Control based on SDRE) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب در چهار بخش جداگانه به صورت زیر اموزش داده می شود.
مدت زمان جلسه :4 ساعت و30 دقیقه
فایل های همراه جلسه: فایل تصویری ، فایل پاورپوینت درس ، ، m-file های نرم افزار متلب
بخش اول :
طراحی قانون کنترل بهینه مقاوم با استفاده از کنترل کننده مد لغزشی بر اساس معادلات
ریکاتی وابسته به حالت
مدت زمان بخش اول : 2 ساعت و 5 دقیقه
فایل های همراه بخش اول: فایل تصویری ، فایل پاورپوینت درس ، فایل PDF پاورپوینت درس
پیش نمایش جلسه اول
بخش دوم:
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Point to Point
مدت زمان بخش دوم : 1 ساعت و 5 دقیقه
فایل های همراه بخش دوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش دوم
بخش سوم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Trajectory Tracking
مدت زمان بخش سوم : 35 دقیقه
فایل های همراه بخش سوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش سوم
بخش چهارم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
جهت محاسبه خطای Minimum Mean Square Error
مدت زمان بخش چهارم 45 دقیقه
فایل های همراه بخش چهارم : فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش چهارم
در این جلسه اموزشی ، نحوه پیاده سازی کنترل کننده گام به عقب(Backstepping) به صورت ترکیب با فیلتر کالمن توسعه یافته پیوسته (Extended Kalman Bucy Filter) در حالت ردیابی یک مسیر از پیش تعیین شده (Trajectory Tracking) ، بر روی سیستم کوادروتور به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان جلسه :45 دقیقه
فایل های همراه جلسه: فایل تصویری ، m-file های نرم افزار متلب
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم



علی
ببخشید من اونجا رو اشتباه کردم
ولی درون اتنگرال و درون کروشه جلوی (A(x اون x کوچیک چیه؟ چون بیرون کروشه یک X هست!!!
اینجوری با فرمول مشتق S جور در نمیاد.
مهندس بابایی
فرمول ها صحیح هستند. شما باید کمی بیشتر دقت کنید.
علی
خانم مهندس فکر کنم تو اسلاید 26 این فرمول سطح لغزش یه مشکلی داره !!!!!!
احتمالا بین (G*(Xt-X0 و اون انتگرال ، بجای منها مساوی نیست؟
مهندس بابایی
لطفا بفرمایید بر چه اساس به این نتیجه رسیدید که به جای منها باید مساوی قرار بدیم؟؟
مهندس بابایی
لطفا بفرمایید بر چه اساس به این نتیجه رسیدید که به جای منها باید مساوی قرار بدیم؟؟
علی
سلام
شما در اسلایدهای اول جلسه 13 فرمودید SDRE خودش یک روش مقاوم به نایقینیها و اغتشاشها است.
سوال من اینه : پس چرا از روش اسلایدینگ که یک روش مقاوم هست استفاده میکنید و در اسلاید 25 میفرمایید از مدلغزشی برای مقاوم بودن به نایقینی ها استفاده میشه؟ مگر خود SDRE مقاوم نیست؟
مهندس بابایی
با سلام
ترکیب این دو روش کنار هم پاسخ بهتری به شما می دهد. مهمترین خاصیت SDRE بهینه بودن ان است اما تا حدودی با شرایط خاص، مقاوم بودن را هم در خود میگنجاند. اما به تنهایی قادر به براورد همه نیازهای مقاوم بودن برای ما تحت هر شرایطی نیست.
مهندس بابایی
با سلام
ترکیب این دو روش کنار هم پاسخ بهتری به شما می دهد. مهمترین خاصیت SDRE بهینه بودن ان است اما تا حدودی با شرایط خاص، مقاوم بودن را هم در خود میگنجاند. اما به تنهایی قادر به براورد همه نیازهای مقاوم بودن برای ما تحت هر شرایطی نیست.
علی
با سلام خدمت سرکار خانم بابایی
ببخشید در اسلاید 26 از بخش اول جلسه 13 چرا سطح لغزش رو به این صورت گرفتید؟ آیا پیش زمینهی محاسباتی داره؟
مهندس بابایی
با سلام
بر اساس تجربه و مطالعه مقالات گوناگون و همچنین محاسبات منطقی، این سطح اسلاید انتخاب شده است.در فیلم اموزشی این جلسه، این نکات کامل توضیح داده شده است. ما گفتیم که S را چگونه تعریف کنیم که Ucont برابر با (P*X *R(INV)*B(T – شود؟ و ادامه ماجرا….
در واقع این سطح اسلاید، به ما قدرت انتخاب می دهد. به عبارتی چون سطح اسلاید را به ماتریس( G(x وابسته نمودیم این انعطاف پذیری را به ما در تغییر ان می دهد. مثلا شما می توانید ( G(x را متفاوت از انچه که من تعریف کردم، تعریف کنید. اما اگر از روش ترکیبی اسلایدینگ با SDRE استفاده می کنید پیشنهاد می کنم از همین سطحی که من استفاده کردم استفاده نمایید و تنها روی مقادیر ماتریس (G(X مانور دهید.
موفق باشید.
رامین
سلام
بابت این مجموعه خیلی خیلی ممنونم
سوالی که از مقاله Robust Backstepping Control of a Quadrotor UAV Using Extended Kalman Bucy Filter بوجود میاد اینه که
با همه اینها در این مقاله تنها نشان داده میشود که تخمين حالتها به مقدار مطلوب میرسند نه خود حالتها
چرا اینجوری هستش؟
مهندس بابایی
با سلام
از توجه شما به این مجموعه اموزش ممنونم.
کاملا در شکل ها به طور واضح نشان داده شده است که خود حالت های سیستم به مقدار مطلوب می رسند. اصلا تا خود حالت ها به مقدار مطلوب همگرا نشن چه جوری می تونیم ادعا کنیم که حالت های تخمین زده شده که از حالت های واقعی سیستم به دست اومدند به مقدار مطلوب همگرا میشن؟ دقت کنید که برای ادعای این موضوع، مقادیر اصلی، تخمین زده شده و واقعی در شکل ها در کنار هم ترسیم شده اند که این هدف بهتر برای خواننده درک شود.
موفق باشید.
محمد عبداله زاده
سلام خانم دکتر ببخشید امکانش هست رفرنس یا مقاله در مورد اثبات سطح لغزش در sdre رو یدین ممنون میشم
مهندس بابایی
با سلام
به مقاله زیر ارجاع دهید کفایت می کند:
https://journals.sagepub.com/doi/full/10.1177/0142331216640600
lموفق باشید.
محمد
سلام و تشکر دوباره از زحمات شما
لطف میکنید دو مقاله مرجع که شامل موضوع fault tolerant control و pso در کنار کووادروتور هست رو جهت مطالعه معرفی کنید؟ بسیار از شما ممنونم
مهندس بابایی
با سلام
همانطور که قبلا هم به سایر دوستان توصیه کردم، شما می بایست در وبگاه های معتبر مانند web of science, scopus, google scholar دنبال مراجع مربوط به دو سه سال گذشته باشد، که اموزش نحوه جستجو در این سامانه ها رو نیز در سایت قرار دادم. منابعی که اکنون من در ارشیو خود دارم برای قبل ۲۰۱۵ هستند، بنابراین حتما دنبال منابع به روز باشید.
موفق باشید.
محمد عبداله زاده
سلام خانم دکترخوب هستین ببخشید امکانش نیس بتونید شبکه عصبی رو در سیستم اموزش بدین اموزش هاتون واقعا جذابن ممنون میشم بتونید این قسمت رو به اموزش های خوبت.ن اضافهکنید و نحوه کدنویسی شبکه عصبی در mfileرواموزش بدین با تشکر فراوان از اموزش های خیلی خوبتون
مهندس بابایی
با سلام
از لطف شما ممنونم.
در حال حاضر به علت مشغله کاری امکان پذیر نیست. اما می تونید از اموزش های سایر همکاران در زمینه شبکه عصبی استفاده کنید و با توجه به شناختی که اکنون نسبت به سیستم کوادتور پیدا کردید، با اندکی تلاش و دقت قطعا قادر به پیاده سازی خواهید بود.
موفق باشید.
جواد
سلام خانم دکتر
وقتتون بخیر
بنده مقاله زیر از شما را خوندم. بسیار مقاله جامع و کاملی بود.
Robust Backstepping Control of a Quadrotor UAV Using Extended Kalman Bucy Filter
سوالی که پیش میاد بصورت زیر است و ممنونم میشم که راهنمایی بفرمایید.
با توجه به رابطه سیگنال کنترل به دست آماده در مقاله (روابط (37 و 38 و 40)) سیگنال کنترل اصلی از xi به دست میآید، حالآنکه بر طبق روابط (37 و 38 و 40)، xi خود برحسب سیگنال کنترل اصلی بیانشده است. این موضوع را چگونه توضیح میدهید؟
مهندس بابایی
با سلام
نظر لطف شماست.
در فیلم اموزشی مربوط به این روش کنترلی، به طور کامل این موضوع توضیح داده شده است.یک بار دیگه این جلسه رو مشاهده بفرمایید. ببینید ما یک سیگنال کنترلی دلخواه بر حسب xi تعریف کردیم تا بتونیم سیستم اصلی رو بر حسب متغیرهای zi به فرمت افین تبدیل کنیم تا بتونیم روش گام به عقب رو پیاده سازی کنیم.بنابراین کاملا طبیعی است که متغیرهای xi بر حسب سیگنال کنترلی باشند.
موفق باشید.
محمد
با عرض سلام و خداقوت
ممنونم از آموزش فوق العادتون و امیدوارم همچنان تکمیل تر از قبل ما رو با روش های مختلق کنترلی بر روی سیستم پیچیده آشنا کنید
سوالی داشتم در مورد معادله بدست امده برای u1 در روش گام به عقب متاسفانه من نمیتونم ترم هایی که شما بدست آوردید رو بدست بیارم متوجه نمیشم چطور ترم Z’2 چطور جاگذرای شده که x1d , x2d در معادلات بعدی لیاپانوف دیده نمی شود
همچنین متاسفانه پاورپوینت های موجود همه دچار به هم ریختگی هستند
ممنونم
مهندس بابایی
با سلام
از توجه شما به این مجموعه اموزشی ممنونم.
ببینید اینکه چه جوری z1 و z2 با متغیرهای x1d و x2d معادل سازی می شوند در فیلم اموزشی کامل توضیح داده شده است دقایق 20-25 فیلم اموزشی این جلسه رو مجددا مشاهده بفرمایید. فقط یک چایگذاری بسیار ساده است که حتما باید یک بار خودتون روی کاغذ انجام بدید تا براتون جا بیافتاد. اما اگر به صورت کلی در مفهوم روش گام به عقب مشکل دارید ابتدا این روش رو به طور کامل از کتاب اسلوتین و یا اموزش های کنترل غیرخطی همکاران فرابگیرید.
فایل های پاورپوینت بسیار منطم و مرتب تهیه شده اند، امکان دارد در هنگام اپلود این مشکل به وجو امده باشد. در صورت نیاز می توانید فرمت pdf فایل های پاورپوینت را از پشتیبانی درخواست نمایید.
موفق باشید.