در این جلسه سیستم کوادروتور از لحاظ سخت افزاری و عملکردی به طور کامل توضیح داده می شود. این جلسه تحت عنوان پیش درامدی بر کوادروتور ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
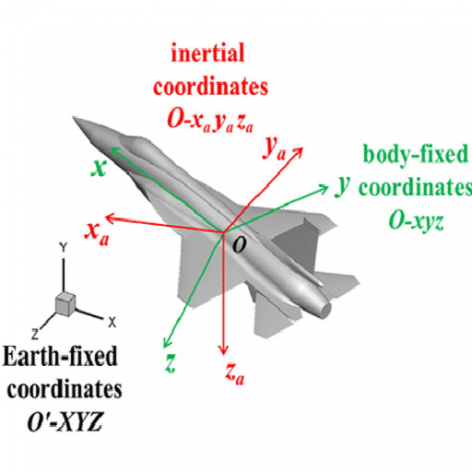
در این جلسه مفهوم پایه ای عملکرد سیستم کوادروتور، معرفی محورهای فرضی حاکم بر سیستم، نحوه انتقال از فریم بدنه به فریم اینرسایی و بالعکس و همچنین نحوه استخراج معادلات دینامیکی موتورهای براشلس DC مورد استفاده در سیستم کوادروتور به طور کامل توضیح داده می شود. . این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (1) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی کوادروتور شامل متغیرهای حالت سیستم به طور کامل بررسی می شود. در ادامه معادلات دینامیکی حاکم بر سیستم کوادروتور از طریق دو روش نیوتن-اویلر و همچنین اویلر-لاگرانژ به صورت جداگانه و به تفصیل توضیح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (2) ارایه می شود.
مدت زمان: 53 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی سیستم کوادروتور از منظری دیگر مورد بررسی قرار می گیرد و مدلسازی سیستم کوادروتور بر مبنای تعاریف علم سینماتیک و علم دینامیک انجام و معادلات ریاضی سیستم استخراج می گردد . در ادامه نیروها و گشتاورهای وارد بر سیستم کوادروتور به طور کامل توضیح داده می شوند و در نهایت نحوه به دست اوردن معادلات فضای حالت سیستم شرح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (3) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به علم ایرودینامیک پرواز پرداخته می شود. نیروهای ایرودینامیکی به طور کامل توضیح داده می شوند و سپس ایرودینامیک عمودپروازها به طور اختصاصی برای سیستم کوادروتور مطرح و روابط ان استخراج می گردد. در ادامه نحوه محاسبه سرعت و مسیر باد که مهمترین عامل اغتشاش خارجی بر هم زننده تعادل این سیستم پرنده می باشد، مطرح می گردد. این جلسه تحت عنوان ایرودینامیک پرواز (1) ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
این جلسه در ادامه جلسه پنجم ، به تکمیل روابط ریاضی ایرودینامیک پرواز سیستم کوادروتور می پردازد. در ادامه روش های محاسبه نیروی دراگ جهت تخمین بردار و مسیر باد به طور کامل شرح داده می شوند و در نهایت معادلات فضای حالت سیستم کوادروتور به همراه اثرات ایرودینامیکی استخراج می گردند. این جلسه تحت عنوان ایرودینامیک پرواز (2) ارایه می شود.
مدت زمان: 50 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به ساختار کنترلی سیستم کوادروتور پرداخته می شود و تمامی لایه های کنترلی به همراه بلوک دیاگرام انها و ارتباط بین هریک از این لایه های کنترلی به طور کامل مطرح می گردد . دانش کسب شده در این جلسه پیش زمینه طراحی هر نوع کنترلر دلخواه برای این سیستم پرنده می باشد.
مدت زمان: 66 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه فیلتر کالمن پیوسته توسعه یافته به عنوان یک مشاهده گر و تخمین زننده مطرح در سیستم های غیر خطی معرفی می گردد و در نهایت نحوه تخمین متغیرهای حالت سیستم کوادروتور بر مبنای این نوع فیلتر خاص به طور کامل توضیح داده می شود..
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
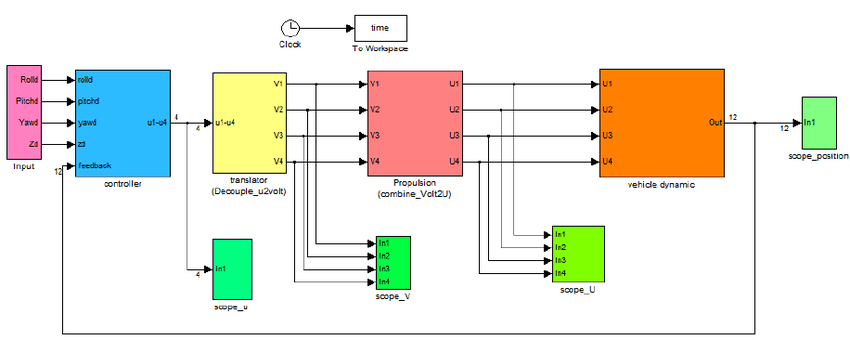
در این جلسه نحوه پیاده سازی روش کنترلی مد لغزشی بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 72 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720P
در این جلسه نحوه پیاده سازی الگوریتم بهینه سازی ژنتیک به عنوان یک روش تحلیلی ، جهت محاسبه دقیق تری از پارامترهای کنترل کننده مد لغزشی اموزش داده می شود.
مدت زمان: 74 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی فیلتر کالمن پیوسته توسعه یافته ، جهت تخمین متغیرهای حالت سیستم کوادروتور در نرم افزار متلب اموزش داده می شود.
مدت زمان: 47 دقیقه
فایل های همراه: فایل تصویری ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی کنترل کننده پسگام (Backstepping) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 57 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه اموزشی ، نحوه پیاده سازی یک کنترل کننده مقاوم و بهینه ترکیبی(ROSMC) بر مبنای معادلات ریکاتی وابسته به حالت ( SDRE) تحت عنوان (Robust Optimal Sliding Mode Control based on SDRE) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب در چهار بخش جداگانه به صورت زیر اموزش داده می شود.
مدت زمان جلسه :4 ساعت و30 دقیقه
فایل های همراه جلسه: فایل تصویری ، فایل پاورپوینت درس ، ، m-file های نرم افزار متلب
بخش اول :
طراحی قانون کنترل بهینه مقاوم با استفاده از کنترل کننده مد لغزشی بر اساس معادلات
ریکاتی وابسته به حالت
مدت زمان بخش اول : 2 ساعت و 5 دقیقه
فایل های همراه بخش اول: فایل تصویری ، فایل پاورپوینت درس ، فایل PDF پاورپوینت درس
پیش نمایش جلسه اول
بخش دوم:
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Point to Point
مدت زمان بخش دوم : 1 ساعت و 5 دقیقه
فایل های همراه بخش دوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش دوم
بخش سوم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Trajectory Tracking
مدت زمان بخش سوم : 35 دقیقه
فایل های همراه بخش سوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش سوم
بخش چهارم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
جهت محاسبه خطای Minimum Mean Square Error
مدت زمان بخش چهارم 45 دقیقه
فایل های همراه بخش چهارم : فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش چهارم
در این جلسه اموزشی ، نحوه پیاده سازی کنترل کننده گام به عقب(Backstepping) به صورت ترکیب با فیلتر کالمن توسعه یافته پیوسته (Extended Kalman Bucy Filter) در حالت ردیابی یک مسیر از پیش تعیین شده (Trajectory Tracking) ، بر روی سیستم کوادروتور به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان جلسه :45 دقیقه
فایل های همراه جلسه: فایل تصویری ، m-file های نرم افزار متلب
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم



محمد
و همچنین ببخشید سر کار خانم دکتر طبق توضیحات خوبتون برا محاسبه ueq که از طریق sdot=0 به دست می اید چرا از ماتریس(G(x مشتق نگرفتین در رابطه و فقط از (x(t در رابطه مشتق گرفتین ممنون میشم این قسمت رو توضیح بدین خانم دکتر من مقالات متوعی رو مطالعه کردم هیچ کدوم سطح لغزش که شما طراحی کرده بودین رو به این صورت در نظر نگرفتن ممنون میشم اگه امکان داره این قسمترو برام رفع اشکال کنید و زحمت بکشین اثبات این روش رو در اختیار بنده بگزارید با تشکر از اموزش های بسیار عالیتون
مهندس بابایی
دوست عزیز ، تا این مرحله اگر دقت کرده باشید پاسخ سوالات بسیاری از دوستان شما که احتمال می رفت سوال خیلی از دانشجویان باشد به صورت عمومی پاسخ داده شد تا همه دوستان استفاده کنند. اما اشکالات فردی دوستان فقط و فقط در جلسات اموزشی فردی هر شخص به صورت جداگانه پاسخ داده خواهند شد.
موفق باشید.
محمد
سلام و روز بخیر خانم دکتر ببخشید ی سوال ممنون میشم اثبات مرتبط با جلسه 13 برای به دست آوردن usliding که از طریق تابع شبه لیاپانف برای به دست اوردن u dis در پاور پوینت زحمت ارائه کشیدین بدین اخه اثباتش رو طبق مراحل شما پیش میرم نتایجم با نتیاج شما فرق می کنه با تشکر
مهندس بابایی
سلام بر شما
دقت بفرمایید که این بحث اثبات پایداری چندین بار در جلسات مختلف همین مجموعه اموزشی تکرار شده است، لطفا به جلسات مربوطه مراجعه بفرمایید و همچنین جهت مرجع دهی می توانید به مقالات من و یا دیگر مقالات موجود در این زمینه رفرنس دهی نمایید.
mohammad
خانم دکتر منظورم انتخاب تابع لیاپانف نیست بلکه با جایگداری sopt در مشتق تابع لیاپانف و ساده سازی رابطه من با رابطه ای که شما زحمت نوشتن اون رو کردین متفاوته البته از همون سطح لغزشی که شما زحمت توضیح دادنش کشیدین استفاده کردم ممنون میشم لطف کنید اگه مقاله ای در این موورد خودتون خوندید و زحمت توضیح دادن اون رو برا ما کشیدین ویا اینکه شما مقاله ای در این زمینه دارید ممنون میشم در اختیار من بزارید بتونم مشکلک حل کنم
مهندس بابایی
اگر با دقت جایگذاری ها رو انجام بدید قطعا به همون رابطه ای که من نوشتم خواهید رسید.در ادامه نیز من لینک برخی از مقالاتم رو براتون قرار میدم:
https://journals.sagepub.com/doi/full/10.1177/0142331216640600
https://ieeexplore.ieee.org/document/7985155
http://ijeee.iust.ac.ir/article-1-1258-en.html
https://miscj.aut.ac.ir/article_3113.html
http://psc-ir.com/cd/2016/papers/1421.pdf
پایدار باشید.
جواد
1) روش محاسبه u_x و همچنین u_y در مقاله خودتون با عنوان (Robust Backstepping Control of a Quadrotor UAV Using Extended Kalman Bucy Filter) رو میشه توضیح بدهید. چگونه از x_d و y_d متغیرهای phi_d و thete_d محاسبه میشود؟
مهندس بابایی
سلام
این موضوع به طور کامل در جلسات اموزشی مربوط به روش پسگام بازگشتی توضیح داده شده است. لطفا به جلسات مربوطه مراجعه فرمایید. موفق باشید.
مجتبی رضایی بزرگمهر
باسلام خانم دکتر
بنده دوره را خریداری کردم، لینک ها برام ارسال شد، اما الان لینک ها کار نمیکند.
ممنون میشم اگه زودتر رسیده گی کنید.
مهندس بابایی
سلام بر شما
لظفا با پشتیبانی یا مدیریت سایت تماس بگیرید تا مشکل برطزف شود. در صورت برطرف نشدن اطلاع دهید تا رسیدگی شود.
جواد
سلام خانم مهندس
وقتتون بخیر
بنده مقاله زیر از شما را خوندم. بسیار مقاله خوبی بود.
Robust Backstepping Control of a Quadrotor UAV Using Extended Kalman Bucy Filter
یک سوال دارم از این مقاله.
اگر در بخش شبیهسازی فرض بر این باشد که کوادروتور متغیرهای موقعیت و زاویه را میتوان اندازهگیری کرد. آیا این فرض در عمل امکانپذیر هستش؟ با استفاده از کدام سنسور امکان اندازهگیری موقعیت و زاویه وجود دارد؟
مهندس بابایی
سلام بر شما
نظر لطف شماست.
من شخصا تاکنون کار ساخت عملی این ربات پرنده را انجام نداده ام. اما بله در عمل امکان پذیر است و مقالات بسیار زیادی در این زمینه ساخت کوادروتور و سنسورهای تخمین ان موجود می باشد. از مخازن دیجیتالی دانشگاه های مطرح در زمینه ساخت کوادروتور می تونید اطلاعات خوبی به دست بیارید، مانند دانشگاه پنسیلوانیا امریکا، دانشگاه کرنل امریکا، بریتیش کلمبیا کانادا و …
اما به عنوان مثال مثلا برای تخمین شتاب، سنسور شتاب سنج ADXL330 ساخت کمپانی Analog Devices کاربرد زیادی در ساخت کوادروتورها جهت تخمین شتاب بدنه دارد و همچنین سنسور ژیروسکوپ سرعت زاویه ای LISY300AL ساخت کمپانی ICT Electronics هم همینطور
.این سنسورها دارای خروجی انالوگ هستند که داده های انها از طریق یک میکروکنترلر دریافت می شود و در نهایت با استفاده از یک مبدل انالوگ به دیجیتال ADC،خروجی سنسورها اعدادی ده بیتی بین 0 تا 1023 را نمایش می دهند. و سنسورهای دیگر نیز به همین طریق موجود هستند.
امادقت کنید که روز به روز انواع گوناگون و جدیدی از ین سنسورها روانه بازار می شوند که نسبت به مدل پیشین خود بسیار مفیدتر هستند.
موفق باشید.
reaz
منظور بنده این هست که این g با توجه به حذف متغیر x7 همچنان یک بایاس برای نقطه ی تعادل است، اگر هم بنا را بر حذف نشدن x7 در اثر ضرب در متغیرهای حالت بگذاریم که در مخرج صفر ایجاد میشود اگر مبدا نقطه ی تعادل باشد…
reaz
سلام ممنون از زحماتتون خانوم دکتر
در مبحث sdre و تاکید شما بر روی شرط f0=0 ، با وجود g و در نتیجه ی آن درایه ی ایجاد شده به صورت g/x7*x7 این شرط اتفاق میافتد؟
مهندس بابایی
سلام بر شما
متوجه منظور شما نشدم. لطفا سوال خود را واضح تر بفرمایید که اشکال شما دقیقا چیست.
reaz
شما فرمودید در روش sdc ما شرطی به صورت f(x=0)=A(x)x=0 داریم یا به بیان دیگر نقطه ی تعادل در صفر باشد در سطری که مرتبط با g هست مگر غیر این هست که ما خواهیم داشت: x’8=(-g/x7)*x7 در این صورت بحث نقطه ی تعادل برای این سطر و حالت می شود: 0=g !???
مهندس بابایی
لطفا جلسه سیزدهم بخش اول دقیقه 90 به بعد رو مجددا مطالعه بفرمایید. همچنین دقت بفرمایید (0)x7 مقداری غیر صفر دارد.
موفق باشید.
reaz
درسته ولی ترم g در نهایت وجود دارد و متوجه میشم شرط اول sdc با بودن این ترم چطور اتفاق میافتد وقتی ترم x7 ساده و حذف شد مقدار g چیزی ضری نمیشود تا صفر شود
reaz
با سلام
ببخشید در مورد فیلتر کالمن سوالی داشتم. شما در ابتدای اسلایدها بیان کردید که ما زاویه را مستقیم نمیتوانیم محاسبه نماییم اما در نوشتن فیلتر کالمن از H=I استفاده کردید یعنی تمامی حالتها را در خروجی در نظر گرفتید من دچار اشتباهی شدم؟ یا اشکال درستی هست؟
مهندس بابایی
سلام بر شما
اینکه در بحث فیلتر کالمن گفته می شود که مستقیما نمی توانیم این پارامترها را اندازه گیری نماییم، منظور به کارگیری یک سنسور در حالت عملی است که اینکار را انجام دهد. اما در حالت تیوری فرض بر این است که تمامی حالت ها در خروجی قابل رویت هستند و به همین منظور از یک ماتریس همانی متناسب با تعداد متغیرهای حالت سیستم برای H استفاده شده است. دقت کنید که می توانید وزن این ماتریس را برای هر پارامتر به صورت جداگانه و متفاوت هم در نظر بگیرید.
موفق باشید.
مهدی
سلام
خسته نباشید
معادلات ۶ درجه آزادی یعنی چه؟
میشه این موضوع رو برام توضیح بدین یکمی برام گنگه
ممنون
مهندس بابایی
سلام بر شما
به زبان ساده، درجات ازادی سیستم یعنی تعدادی از پارامترهای سیستم که می توانیم انها را تحت کنترل دراوریم. در بحث کوادروتور هم سعی می کنیم معادله اولیه که شامل 12 متغیر است ، به سیستم شتابی با 6 متغیر تبدیل کنیم تا یتوانیم 6 متغیر اصلی زیر سیستم انتقالی و چرخشی را تحت کنترل درواریم.
موفق باشید.
حدیث
آیا برای کوادراتور رویتگری غیر از فیلتر کالمن و SMO استفاده شده است یا نه.
توی دوتا مقاله دیدم که فقط زیرسیستم چرخشی کوادراتور برای رویت مورد بررسی قرار گرفته بود،این یعنی فقط رویتگر های مطرح شده برای تخمین مشتقات phi,teta,say بکار میرند؟به این معنا هست که کافیه فقط متناسب با دینامیک مربوط به زیر سیستم چرخشی رویتگر طراحی کنیم (چوت احتمالا موقعیت مکانی کوادراتور یعنی x,y,z و مشتقات آنها که درواقع سرعت هستند سنس شده باشد؟
مهندس بابایی
سلام بر شما
من به شخصه زیاد بر روی این موضوع کارنکرده ام، اما با اطمینان خاطر عرض می کنم که بله، رویتگرهای دیگری هم به غیر از مواردی که شما نام بردید هم در بحث کوادروتور استفاده می شوند. کافیست در مراجع معتبر مانند Scopus, web of science, google scholar…. با زدن کلمات کلیدی مانند quadrotor, observer, UAV, estimateو…. این مقالات را پیدا کنید.
اینکه چرا بیشتر مقالات روی بحث تخمین زیر سیستم چرخشی کار می کنند به علت استفاده از تخمینگر بر می گردد. اینکه اصلا هدف از استفاده از تخمینگر چیست؟ ما معمولا در قسمت های با مشکل وجود برخی از سنسورها رو به رو هستیم سعی می کنیم از تخمینگر استفاده کنیم. به عنوان مثال اگر شتاب مرتبه سوم را بخواهیم اندازهگیری کنیم، به احتمال بالا سنسور مورد نیاز جهت اندازه گیری این پارامتر زا نخواهیم یافت، بنابراین سعی می کنیم از یک تخمین برای ان استفاده کنیم. در بحث کوادروتور هم ، یه همین صورت است. پارامترهای زیر سیسنم انتقالی به راحتی قابل تخمین است چرا که برای اندازه گیری فواصل x,y,z به سنسورهای پیچیده ای نیاز نیست، اما در زیر سیستم چرخشی چون با زوایا سر و کار داریم اصولا کمی چالش برانگیزتر است و برای همین پژوهشگران بیشتر در بحث تخمین روی این قسمت متمرکز هستند تا بتوانند به نتیجه دلخواه نهایی که همان کاهش سنسورهای مورد نیاز در بخش عملی که منجر به کاهش هزینه ها می شود دست یابند. البته با تمام این توضیحات، دقت کنید که مقالاتی هم هستند که در بحث تخمین پارامترهای کوادروتور ، بر روی هر دو زیر سیستم چرخشی و انتقالی متمرکز هستند.
موفق باشید.
محمد
سلام استاد گرامی
ممنون از زحماتتون
استاد چرا بیشتر روئیتگرهایی که برای کووادروتور طراحی شدن برای تخمین attitude هست دلیل این امر چی هست؟ در واقعیت زیرسیستم انتقالی نیاز به تخمین نداره یا که دلیل خاصی برای علاقه به تخمین زوایا وجود داره؟
مهندس بابایی
سلام بر شما
اینکه چرا بیشتر مقالات روی بحث تخمین زیر سیستم چرخشی کار می کنند به علت استفاده از تخمینگر بر می گردد. اینکه اصلا هدف از استفاده از تخمینگر چیست؟ ما معمولا در قسمت های با مشکل وجود برخی از سنسورها رو به رو هستیم سعی می کنیم از تخمینگر استفاده کنیم. به عنوان مثال اگر شتاب مرتبه سوم را بخواهیم اندازهگیری کنیم، به احتمال بالا سنسور مورد نیاز جهت اندازه گیری این پارامتر زا نخواهیم یافت، بنابراین سعی می کنیم از یک تخمین برای ان استفاده کنیم. در بحث کوادروتور هم ، یه همین صورت است. پارامترهای زیر سیسنم انتقالی به راحتی قابل تخمین است چرا که برای اندازه گیری فواصل x,y,z به سنسورهای پیچیده ای نیاز نیست، اما در زیر سیستم چرخشی چون با زوایا سر و کار داریم اصولا کمی چالش برانگیزتر است و برای همین پژوهشگران بیشتر در بحث تخمین روی این قسمت متمرکز هستند تا بتوانند به نتیجه دلخواه نهایی که همان کاهش سنسورهای مورد نیاز در بخش عملی که منجر به کاهش هزینه ها می شود دست یابند. البته با تمام این توضیحات، دقت کنید که مقالاتی هم هستند که در بحث تخمین پارامترهای کوادروتور ، بر روی هر دو زیر سیستم چرخشی و انتقالی متمرکز هستند.
موفق باشید.