آموزش مد لغزشی طبق کتاب اسلوتین
در این پست فیلم آموزش مد لغزشی طبق کتاب اسلوتین قرار داده میشود. کتاب اسلوتین رو اگه خونده باشید متوجه خواهید شد که بسیاری از مطالب این فصل گنگ هستند و نیاز به توضیحات بیشتر دارن. ضمن اینکه به نظر من بعضی از مطالب این کتاب بعد از اینکه فصل به پایان رسید باید باز هم در موردشون بحث بشه اما توی کتاب این امکان وجود نداره . از طرفی مثال هایی در این کتاب وجود داره که اگه با روند شبیه سازی اون ها هم آشنا بشیم در یادگیری این روش جذاب بسیار موثره. من مد لغزشی رو بارها و بارها بر روی سیستم های مختلف شبیه سازی کردم و مقالات زیادی در این زمینه کار کردم.
چیزی که من تضمین میدم اینه که بعد از این دوره آموزشی، به نتایج زیر خواهید رسید:
مد لغزشی رو به طور کامل و فراتر از مطالب کتاب درک خواهید کرد
با نحوه شبیه سازی مثال ها و بحث روی آنها کاملا آشنا خواهید شد
نحوه تلفیق این روش با روش هایی مثل فازی، ژنتیک و … رو خواهید آموخت (مد لغزشی فازی در همین سایت قرار داده شده است برای دانلود این فیلم آموزشی کلیک بفرمایید)
پیاده سازی این روش بر روی سیستم های غیرخطی پیچیده و شبیه سازی آنها رو یاد خواهید گرفت.
میتونید برای سیستم خودتون این شبیه سازی ها رو انجام بدید
مقالات مختلف رو که در زمینه مد لغزشی هستن میتونید براحتی درک کنید.
تفاوت این آموزش با آموزش دیگری تحت عنوان “آموزش مد لغزشی از طراحی تا شبیه سازی“ که در سایت قرار داده شده در این هست که آموزشی که در این پست قرار داره برای افرادیه که میخوان با عمق بیشتری مد لغزشی رو یاد بگیرن و اون آموزش برای کسیه که اطلاعات بسیار ناچیزی از مد لغزشی داره و فقط میخواد روی یه سیستم ساده یک مد لغزشی ساده رو پیاده کنه. اما در اینجا هم با مباحث بیشتری آشنا خواهید شد و هم مطالب با عمق بیشتری ذکر خواهند شد. همچنین یک “جزوه کاربردی مد لغزشی“ نیز در این سایت قرار داده شده است که همونطور که از اسمش معلومه فقط حالت کاربردی داره.
جلسه اول:
مقدمات و تبدیل مسئله مرتبه n به مسئله مرتبه یک
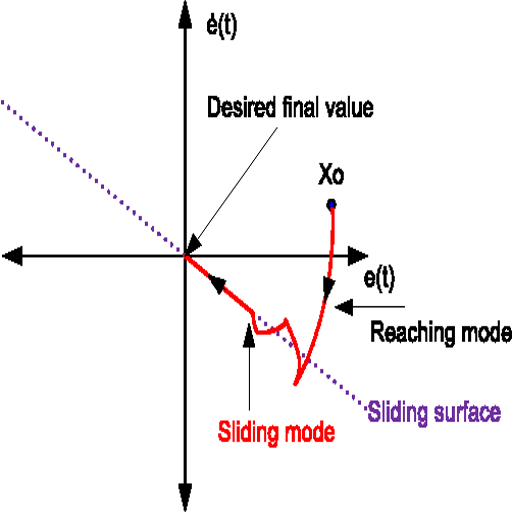
در این جلسه در مورد صورت مسئله مد لغزشی، انواع نامعینی، سطوح لغزشی و از همه مهمتر تبدیل مسئله مرتبه ان به مسئله مرتبه یک در مد لغزشی پرداخته شده است. در ادامه کلا در ارتباط با اینکه چطور میتوان یک مسئله ردیابی مرتبه ان رو به یک مسئله پایدارسازی از مرتبه یک (سطح سوئیچینگ) تبدیل کرد بحث کرد.
مدت زمان آموزش: 67 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه دوم:
شرط لغزشی ، فیلیپف دینامیک معادل
مبحث ناتمام جلسه قبل در این جلسه به اتمام میرسد. سپس در مورد شرط لغزش به طول مفصل بحث میشود همچنین در ادامه پدیده چترینگ توضیح داده شده است و در نهایت به توضیح فیلیپف و دینامیک معادل پرداخته شده است. دقت کنید این مطلب در کتاب اصلا بخوبی تفسیر داده نشده است.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه سوم:
نحوه طراحی و شبیه سازی مد لغزشی به صورت گام به گام
در این جلسه ابتدا یک الگوریتم برای طراحی مد لغزشی ارائه شده است. این الگوریتم به صورت واضح بیان شده است و به صورت مفصل در مورد آن بحث شده است. مباحثی از قبیل نحوه انتخاب سطح لغزش، چرا سطح لغزش به فرمی که در کتاب است در نظر گرفته می شود؟ چرا در همه مقالات به این فرم نیست و ….. و در ادامه با یک مثال تک ورودی و تک خروجی ابتدا طراحی به طور کامل و براساس الگوریتمی که در ابتدای جلسه گفته شد انجام میشود و سپس این مثال در نرم افزار MATLAB شبیه سازی شده است. و در پایان، به بحث در مورد پارامتر های طراحی در این نرم افزار پرداخته شده است.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه چهارم:
طراحی و شبه سازی مد لغزشی برای سیستم های مرتبه دو و سه
در این جلسه طراحی کنترل کننده مد لغزشی و شبیه سازی آن در نرم افزار MATLAB برای دو سیستم مرتبه دو و سه انجام شده است. یکی از بحث های مهم طراحی مد لغزشی یعنی تبدیل هر سیستم غیرخطی به سیستم مرتبه دوم استاندارد به طور مفصل بحث شده است. همچنین مباحث تکمیلی در مورد تعریف سطح لغزش در مثال مربوط به سیستم مرتبه سه ذکر شذه است.
مدت زمان آموزش: 66 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و 2 ام فایل مربوط به درس
جلسه پنجم:
کنترل انتگرالی ، حد بهره
در ابتدای جلسه، کنترل کننده مد لغزشی برای سیستم های مرتبه n طراحی شده است تا اگر سیستم شما مثلا دارای درجه نسبی ده بود دیگه از اول تا آخر طراحی رو انجام ندید و یا اینکه اگه میخواید طراحی رو انجام بدید بدونید میخواید به چه چیزی برسید. در ادامه به بحث در مورد کنترل انتگرالی و حد بهره پرداخته شده است. توی کتاب دلیل استفاده از کنترل انتگرالی و اینکه چرا باید سطح لغزش در ابتدا صفر باشد چیزی نگفته. از طرفی مثال هم حل نشده است. ما در این آموزش هم کاربرد کنترل انتگرالی رو گفتیم و هم یک مثال رو در نرم افزار متلب شبیه سازی کردیم. پس از اون، به نقطه اوج طراحی مد لغزشی یعنی برای سیستم هایی که به فرم x^(n)=f(x)+g(x)u هستند پرداخته شده است. نحوه اثبات در کتاب خیلی گنگه. این اثبات با تمام جزئیات از ابتدا تا انتها ذکر شده است.
مدت زمان آموزش: 66 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه ششم:
چترینگ و راههای حذف آن (1)
در ابتدا به طراحی یک مثال برای سیستمی که بهره داشته باشه پرداخته شده است. سپس وارد موضوع چترینگ شدیم. کاربردهای چترینگ، نحوه حذف چترینگ در حالت کلی، دسته بندی که برای حذف چترینگ برای حالت های مختلف میتوان انجام داد و شبیه سازی یک مثال برای حالتی که لایه مرزی ثابت باشد موضوعاتیست که در این جلسه کار شده است. برای حذف چترینگ دو دسته بندی کلی انجام شده است یکی حذف چترینگ برای سیستم هایی که باید در آنها لایه مرزی ثابت باشد و دیگری حذف چترینگ برای سیستم هایی که در آنها لایه مرزی متغیر بهتر از لایه مرزی ثابت جواب می دهد. در این جلسه به دسته بندی اول پرداخته شده است.ضمنا مثالی که در این جلسه شبیه سازی شده است مثال7-2 کتاب است.
مدت زمان آموزش: 53 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه هفتم:
چترینگ و راههای حذف آن (2)
در این جلسه به راه حل جذف چترینگ با استفاده از لایه مرزی متغیر پرداخته شده است. این روش برای سیستم هایی که ضریب ورودی کنترلی در آنها یک هست و نیست بررسی شده است و با ذکر مثال و شبیه سازی آن در نرم افزار متلب به صورت مفصل بحث شده است. حذف چترینگ با استفاده از لایه مرزی متغیر با زمان برای سیستم های خاصی هست. پیشنهاد می شود در صورتیکه فقط می خواید این جلسه رو خریداری بفرمایید جلسه قبل رو هم تهیه کنید چون ممکنه برای سیستم شما استفاده از این روش موضوعیت نداشته باشد.
مدت زمان آموزش: 55 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس و ام فایل مربوط به درس
جلسه هشتم:
طراحی مد لغزشی برای یک سیستم چند ورودی – چند خروجی
یک مثال جامع که تمامی مباحث قبل رو بتونه پوشش بده رو طراحی کردم. مد لغزشی با در نظر گرفتن تمامی جوانب برای این سیستم طراحی شده است. در این مثال، یک سیستم دو ورودی و دو خروجی که چهار متغیر حالت دارد در نظر گرفته شده است. محدودیت های لامبدا نیز در صورت سوال مطرح شده است و این موضوع در ابتدای جلسه بحث شده است که چطور می توان محدودیت های مختلف را بر روی پارامتر لامبدا اعمال کرد.توجه بفرمایید این جلسه آخرین جلسه از مجموعه آموزش های مد لغزشی بر اساس کتاب اسلوتین بود. در ادامه سعی دارم نحوه تلفیق این روش با روش های دیگر و انواع دیگر مد لغزشی رو برای شما آماده کنم.
مدت زمان آموزش: 54 دقیقه
محتویات دانلود : فیلم، پاورپوینت درس
جلسه نهم:
در اين جلسه، يک واسط گرافيکي در متلب (gui) توليد شده که با استفاده از آن به طور اتوماتیک مي توانید يک کنترل کننده مد لغزشی (Sliding Mode) براي يک سيستم طراحي کنید. در واقع چکیده مباحث تدریس شده به صورت یک پنل تصویری در این جلسه آمده است. مخصوصاً برای دوستانی که فقط خروجی کار برای آنها مهم است، این واسط گرافيکي می تواند بسیار مفید باشد. این جلسه توسط آقای نورمحمدی فارغ التحصیل ارشد شریف تدریس شده است
برای خرید جلسه 9 به صورت جداگانه می توانید با کلیک بر روی دکمه خرید زیر این جلسه را نیز به سبد خریدتان اضافه کنید
جلسه 9 : طراحی مد لغزشی با استفاده از gui
|
۱۶۰,۰۰۰ تومان قیمت اصلی: ۱۶۰,۰۰۰ تومان بود.۱۱۷,۶۰۰ تومانقیمت فعلی: ۱۱۷,۶۰۰ تومان.Add to cart
|
مطالعه بیشتر
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم





امیر
سلام
معادله
xdot=-x/a+bu
را که در آن a , b در حالت کلی ثابت بوده و فقط در زمان های خاص بطور پله ای تغییر می کنند( به عنوان مثال مقاومت بار که ممکن است به طور پله ای کاهش و یا افزایش یابد)و u سیگنال ورودی قابل کنترل است، در نظر بگیرید. آیا این معادله قابل کنترل با مد لغزشی هست؟
باسپاس
مدیر سایتادمین سایت ( مالک تایید شده )
@امیر,
سلام
در این روش اهمیتی نداره که شما چه نوع اغتشاشی داشته باشید و مد لغزشی برای این نوع از اغتشاشات نیز کارایی لازم رو داره
سپاس و درود
سامی
سلام آقای دکتر
ضمن تشکر فراوان بابت تهیه فیلم های بسیار مفید کنترل مد لغزشی. دو تا سوال از حضورتون دارم.
۱ -آیا معیار یا ایندکسی برای مقاوم بودن یه کنترلر تعریف میشه؟
2-چگونه ادعای مقاوم بودن کنترلر طراحی شده را می توان اثبات نمود؟
ممنون
مدیر سایتادمین سایت ( مالک تایید شده )
@سامی,
سلام
سپاسگزارم
1- خب اگه خطای ردیابی با وجود اغتشاش صفر بشه این به این معنیه که کنترل کننده شما صد در صد مقاومه. مثل اسلایدینگ که این تضمین رو به ما میده. اما در بعضی از کنترل کننده های مقاوم دیگه بحث کاهش اثر اغتشاش هست به این معنی که با یک ورودی کنترلی ثابت، چقدر اثر اغتشاش بر روی خروجی از بین خواهد رفت
2- پاسخ سوال دوم در مورد اول نهفته است
سپاسگزارم
امیر
باسلام
در مورد حذف چترینگ
چرا برای لایه مرزی ثابت شرط
d/dtlsl<-eta
رو در نظر گرفتید در صورتیکه برای لایه متغیر شرط را تا سطح phi بررسی کردید؟
d/dtls-phil<-eta
چرا برای لایه مرزی ثابت و در s<phi تابع سویچینگ را خطی در نظر گرفتید؟
موارد بالا اثبات ریاضی ندارن؟ خصوصا مورد آخری
باسپاس
مدیر سایتادمین سایت ( مالک تایید شده )
@امیر,
سلام
هیچ فرقی نداره از کدوم روش برید. از روشی که لایه مرزی متغیره هم برید نهایتا به جای فی باید یه عدد ثابت بذارید که با مشتق گیری از اون به همون شرط اول میرسید
همونطوری که توی فیلم ها هم توضیح دادم با قرار دادن اون عبارت خطی در لایه مرزی به یک خطای تضمین شده میرسیم. شما یا هر کسی دیگه که بتونه هر عبارت دیگه هم قرار بده منتها آخرش ثابت کنه که این عبارتی که درون لایه مرزی قرار داده باعث میشه که یه خطای تضمین شده به ما بده بازم کار خوبیه. ولی این عبارت یک عبارت سرراسته
سپاس
omid
با سلام
در کتاب اسلاتین فصل کنترل مد لغزشی دوتا مثالو شبیه سازی کرده که فقط نتیجه شبیه سازیو گذاشته.توی این اموزش اون دوتا شبیه سازیو انجام دادید؟
مدیر سایتادمین سایت ( مالک تایید شده )
@omid,
سلام
مثالهایی شبیه سازی کردم که سبک اون دو تا مثال بود ولی یادم نیست خود اون دو تا مثال رو شبیه سازی کردم یا نه. توضیحات مربوط به هر درس رو بخونید
حامد
دست مریزاد و خسته نباشید به اساتید مرجع مهندسی کنترل؛
من با استفاده از همین آموزش دارم مقالات و پایان نامه ام را مینویسم.
یک مقاله کنفرانسی هم با کمک جزوه آموزشی و فیلم ارائه دادم:
https://www.engineeringvillage.com/search/doc/abstract.url?pageType=quickSearch&searchtype=Quick&SEARCHID=0062385bMff8bM4717Mabe5M6b43942520fd&DOCINDEX=1&database=1&format=quickSearchAbstractFormat&dedupResultCount=&SEARCHID=0062385bMff8bM4717Mabe5M6b43942520fd&referer=%2Fsearch%2Fresults%2Fquick.url
اگر کسی متن کامل را هم خواست بفرمایید تقدیم کنم.
مدیر سایتادمین سایت ( مالک تایید شده )
@حامد,
سلام
نظر لطف شماست
مهدی
ببخشید شما میتونید یه مقاله معرفی کنید که مرتبه سه باشه و تک ورودی و تک خروجی هم باشه؟
من هنوز تو تشخیص مرتبه مشکل دارم.
قسمتی از فیلم ها رو خریدم ولی بازم متوجه نشدم.
مدیر سایتادمین سایت ( مالک تایید شده )
@مهدی,
سلام بله خودتون هم میتونید بنویسید
x1dot=x2
x2dot=x3
x3dot=f(x)+b*u
y=x1
مهدی
با سلام.ببخشید شبیه سازی ها بر اساس کد نویسیه یا سیمولینک؟
مدیر سایتادمین سایت ( مالک تایید شده )
@مهدی,
سلام
کد نویسی
amin
با سلام و خسته نباشید. اگه من بخوام تمام مطالب و فیلمهای مربوط به اسلایدینگ رو بخرم باید چیری حدود 170 هزار تومن خرج کنم. اگه یکجا بخرم همه رو چقد تخفیف میدید؟ 130 قبول میکنید؟
مدیر سایتادمین سایت ( مالک تایید شده )
@amin,
سلام
صدو بیست هم میدیم!!!!
هر هفته یک کد تخفیف ارائه میشه که برای خرید های بالاتر از هشتاد هزار تومان سی درصد تخفیف ارائه میشه
این تخفیف اواخر هر هفته ارائه میشه.
توی کانال تلگرام ما به آدرس زیر عضو باشید. کدهای تخفیف رو اونجا میزنیم
@controlref
سپاسگزارم
amin
@مدیر سایت,
وای چقد عالی ، حتما میخرم پس. دستتون درد نکنه
مدیر سایتادمین سایت ( مالک تایید شده )
@amin,
قوربااانت فداااااات مد لغزشی بخری طراحی بکنی شبیه سازی کنی استادت خوشش بیاد ستاره بچینی بوس بوس
🙂
مهدی
با سلام. استادمون این ترم گفته که یک مقاله کنترل مد لغزشی رو باید شبیه سازی کنید.مرتبه اون هم حداقل سه باشه.البته گفتن سیستم موردنظر فقط پایداری و دنبال یابیش موردنظره.ایا با این فیلم ها میشه انجامش داد؟
مدیر سایتادمین سایت ( مالک تایید شده )
@مهدی,
سلام
بله
omid
با سلام
اگر ممکن است اموزشی در مورد کنترل سیستم های under actuated تهیه فرمایید.