 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
آموزش جامع شناسایی سیستم
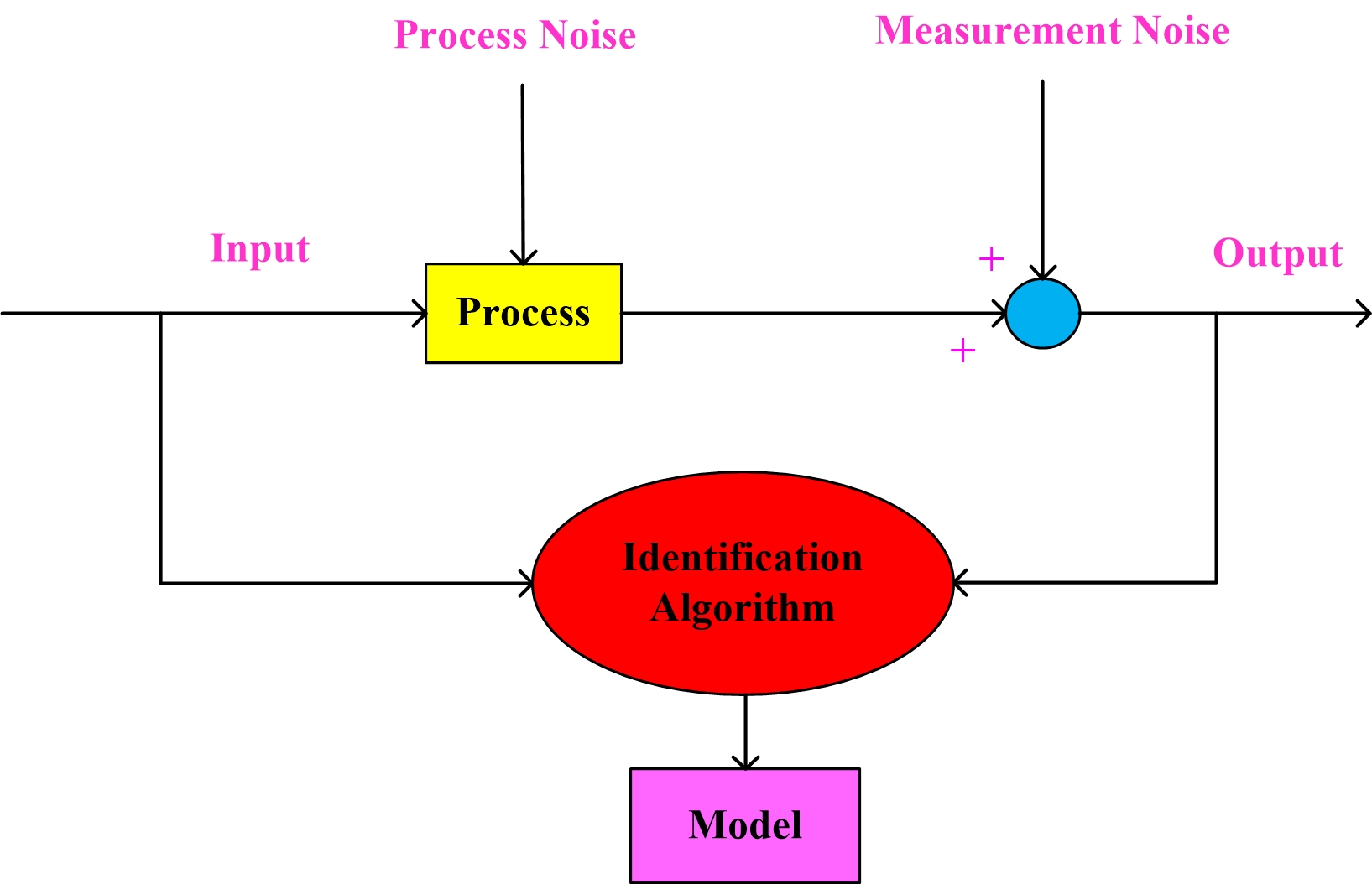
در بسیاری از کاربردها مانند طراحی کنترلکننده، شبیهسازی سیستم، تحلیل رفتار سیستم و پیشبینی آینده نیازمند به یک مدل از سیستم تحت بررسی هستیم. شناسایی سیستم الگوریتمهایی را در اختیار ما قرار میدهد که بتوانیم از دادههای ورودی و خروجی سیستم یک مدل مناسب بدست آوریم که رفتار آن با رفتار سیستم واقعی تا حد ممکن نزدیک باشد.
مرجع اصلی در این سری فیلمها، کتاب شناسایی سیستمهای دینامیک نوشته رولف آیزرمن (2011) است. به طور خلاصه، روشهای شناسایی پارامتری (Parametric) و غیر پارامتری (Non-parametric)، حلقه باز (Open-loop) و حلقه بسته (Closed-loop)، بازگشتی (Recursive) و غیربازگشتی (Non-recursive)، زیرفضا (Subspace Methods)، همرشتاین (Hammerstein Model) و وینر (Wiener Model)، بر اساس همبستگی (Correlation)، حداقل مربعات (Least Squares)، Maximum Likelihood، مدلهای AR، ARMA، ARX، ARMAX، BJ، FIR، فضای حالت و تابع تبدیل، در حوزه زمان و فرکانس و سریهای زمانی (Time Series) مورد بررسی قرار خواهند گرفت. همچنین تولباکس شناسایی متلب معرفی شده و مثالهای مختلفی با آن حل میشود.
توجه: فصلهای ۲۰، ۲۱، ۲۲ و ۲۴ کتاب آیزرمن در این مجموعه ارائه نمیشود. علت ارائه نشدن فصل ۲۰ عدم تسلط مدرس در زمینه شبکههای عصبی است. فصل ۲۱ مربوط به تخمین پارامتر با استفاده از فیلتر کالمن EKF است. با توجه به اینکه تخمین پارامتر با استفاده از خانواده فیلتر کالمن به تفصیل در مجموعه تخمین بهینه حالت (فیلتر کالمن) مورد بررسی قرار گرفته است (جلسه ۸۸)، در اینجا دوباره ارائه نمیشود. برای دسترسی به مجموعه تخمین بهینه حالت اینجا کلیک کنید. همچنین فصل ۲۲ مربوط به مسایل حل عددی در مساله شناسایی است که به خاطر اهمیت کم آن ارائه نمیشود. در نهایت، فصل ۲۴ مربوط به اعمال روشهای مختلف ارائه شده در کتاب بر روی کاربردهای مختلف بوده و صرفا نتایج نشان داده شدهاند و نیاز به توضیح خاصی ندارد.
پیش نیازها: آشنایی با نرم افزار متلب – آشنایی اولیه با سیگنالهای تصادفی و جبر خطی
برای اطلاع از فهرست موضوعی تمام جلسات اینجا کلیک کنید
فهرست جلسات (برای دیدن خلاصه هر جلسه روی جلسه مربوطه کلیک کنید)
در این جلسه ابتدا افراد تاثیرگذار و کتابهای مهم در زمینه شناسایی سیستم معرفی شده و سپس مرجع اصلی سری فیلمهای حاضر که کتاب شناسایی سیستمهای دینامیک نوشته رولف آیزرمن است، معرفی میشود. سپس دو روش مختلف مدلسازی سیستمها یعنی مدلسازی تحلیلی (Theoretical Modeling) و مدلسازی عملی (Experimental Modeling) یا شناسایی (Identification) تعریف میشوند. در ادامه مزایا و معایب دو روش و تفاوتهای آنها بررسی میشود. جلسه اول به صورت رایگان تقدیم میشود.
کتابهای معرفی شده در جلسه اول از اینجا قابل دریافت است. همچنین دادههای مربوط به نوسانگر یه جرمی (پیوست B کتاب آیزرمن) از اینجا قابل دانلود است.
توجه: در دقیقه ۵۶ جلسه اول واحد ظرفیت خازن به اشتباه هانری گفته شده که باید فاراد بیان میشد.
مدت زمان آموزش: یک ساعت و بیست و یک دقیقه
حجم فایل: 154 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و مراجع
جلسه اول:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه، بخشهای ۱-۲ و ۱-۳ کتاب آیزرمن ارائه میشود. ابتدا شناسایی تعریف شده و مراحل مختلف آن معرفی میشود. سپس معیارهای مختلف در بحث شناسایی معرفی شده و روشهای شناسایی طبقهبندی میشوند. در ادامه، روشهای مختلف شناسایی معرفی شده و پیکربندی های مختلف برای پیادهسازی الگوریتمهای شناسایی تشریح میشود.
مدت زمان آموزش: یک ساعت و دو دقیقه
حجم فایل: 140 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و کتاب آیزرمن
پیش نمایش جلسه دوم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۱-۴ و ۱-۵ کتاب آیزرمن ارائه میشود. ابتدا روشهای مختلف شناسایی از جمله پارامتری و غیرپارامتری معرفی شده و سپس معایب و مزایای هر کدام بررسی میشود. سپس معیارهای تحلیل سیگنال مورد بررسی قرار میگیرند. در انتها سیگنالهای تحریک مختلف معرفی شده و نمونههایی از آنها نمایش داده میشوند.
مدت زمان آموزش: یک ساعت و نه دقیقه
حجم فایل: 115 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و کتاب آیزرمن
پیش نمایش جلسه سوم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۱-۶، ۱-۷ و ۱-۸ کتاب آیزرمن ارائه میشود. ابتدا مسایل کاربردی خاص مانند نویز در ورودی و شناسایی سیستمهای MIMO بررسی میشوند. سپس زمینههای کاربردی شناسایی سیستمها به اختصار تشریح میشوند. در نهایت مراجع مهم در زمینه شناسایی سیستم از سال ۱۹۹۲ تا ۲۰۱۱ مورد بررسی قرا گرفته و مسایل مورد بحث در کتابهای مختلف تشریح میشود.
مدت زمان آموزش: چهل و شش دقیقه
حجم فایل: 72 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و کتاب آیزرمن
پیش نمایش جلسه چهارم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۲-۱ و ۲-۲ کتاب آیزرمن ارائه میشود. ابتدا مفاهیم پاسخ ضربه، پله، پاسخ فرکانسی، تبدیل فوریه و تبدیل لاپلاس به اختصار معرفی شده و مدلهای غیر پارامتری در حوزه زمان ارائه میشوند. سپس معادلات دیفرانسیل و نمایش فضای حالت به عنوان مدلهای پارامتری زمان پیوسته معرفی شده و برخی ویژگیهای آنها بررسی میشود. در بخش بعد، مفاهیم نمونهبرداری، سری ضربه و تبدیل z و تابع تبدیل در حوزه فرکانس معرفی میشوند. در انتها، معادلات تفاضلی و نمایش فضای حالت به عنوان مدلهای پارامتری زمان گسسته معرفی شده و برخی ویژگیهای آنها بررسی میشود.
مدت زمان آموزش: یک ساعت و سه دقیقه
حجم فایل: 96 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و کتاب آیزرمن
پیش نمایش جلسه پنجم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۲-۳ کتاب آیزرمن ارائه میشود. ابتدا تعریفهای ابتدایی مانند فرایند تصادفی، تابع نمونه، تابع چگالی احتمال یا PDF، PDF مشترک، فرایندهای ایستا و غیر ایستا، گشتاورها، تابع خود همبستگی یا ACF، چگالی طیف توان یا PSD، استقلال آماری برای سیگنالهای پیوسته معرفی میشوند. سپس برخی فرایندهای مهم مانند فرایند نرمال و نویز سفید معرفی میشوند. در ادامه، ACF و PSD سیگنالهای مهم مانند نویز سفید و فرایند گوسی محاسبه میشود. در انتها، ارتباط بین PSD سیگنالهای ورودی و خروجی برای سیستمهای خطی بیان میشود.
مدت زمان آموزش: یک ساعت و بیست و سه دقیقه
حجم فایل: 120 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و کتاب آیزرمن
پیش نمایش جلسه ششم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۲-۴ و قسمتی از بخش ۲-۵ کتاب آیزرمن ارائه میشود. ابتدا تعاریف آماری مربوط به سیگنالهای تصادفی ارائه میشود. سپس مدلهای مهم سیگنالهای تصادفی و همچنین مدلهای قطعی با اغتشاشات تصادفی معرفی میشوند. مهمترین مدلهای معرفی شده سیگنالهای تصادفیAR ، MA وARMA هستند. مهمترین مدلهای قطعی دارای اغتشاش تصادفی معرفی شده ARX، ARMAX، ARARX، OE، BJ و FIR هستند. در انتها نحوه شناسایی سیستمهای ساده مرتبه اول و دوم را با اندازهگیری پاسخ پله مطرح میشود.
مدت زمان آموزش: یک ساعت و چهار دقیقه
حجم فایل: 101 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و کتاب آیزرمن
پیش نمایش جلسه هفتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه قسمت باقیمانده از بخش ۲-۵ و بخش ۲-۶ کتاب آیزرمن ارائه میشود و بنابراین فصل ۲ کتاب به اتمام میرسد. ابتدا نحوه تقریب یک سیستم غیر متناوب (aperiodic system) با یک سیستم مرتبه n با ثوابت زمانی یکسان از روی پاسخ پله تشریح میشود. سپس مدل خطی مرتبه اول دارای زمان مرده (تاخیر) معرفی میشود. در ادامه نحوه شناسایی سیستمهای دارای انتگرال و مشتق خالص بیان میشود. در انتها، تمرین ۲-۲ کتاب حل شده و در محیط متلب پیادهسازی میشود.
مدت زمان آموزش: یک ساعت و شش دقیقه
حجم فایل: 115 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کد متلب
پیش نمایش جلسه هشتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش یک کتاب که مربوط به شناسایی مدلهای غیرپارامتری در حوزه فرکانس – سیگنالهای زمان پیوسته است، آغاز میشود. از این جلسه فصل سوم کتاب که مربوط به روشهای تحلیل طیفی برای سیگنالهای متناوب و غیر متناوب است، آغاز میشود. به طور خاص، بخش ۳-۱ کتاب آیزرمن ارائه میشود. ابتدا سری فوریه معرفی میشود. سپس تبدیل فوریه شامل DFT و FFT برای سیگنالهای غبرمتناوب معرفی شده و نحوه گسسته سازی سیگنالها در زمان و تبدیل فوریه در حوزه فرکانس تشریح میشود. در ادامه، الگوریتم محاسباتی FFT تشریح شده و با روش DFT مقایسه میشود. در انتها، تمرین ۳-۲ کتاب حل شده و در محیط متلب شبیهسازی میشود.
توجه: در اسلاید آخر تبدیل فوریه سینوسی اشتباه محاسبه شده است. در واقع در تبدیل فوریه سیگنال سینوسی، ضریب ضربه در فرکانس دارای اندازه i/2 بوده و در فرکانس برابر –i/2 است. البته این مساله در نتیجه کدها اشکالی ایجاد نمیکند زیرا در نهایت دامنه تبدیل فوریه برای مقایسه استفاده شده است.
مدت زمان آموزش: یک ساعت و بیست و هفت دقیقه
حجم فایل: 153 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کد متلب
پیش نمایش جلسه نهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۳-۱-۴، ۳-۲ و ۳-۳ کتاب آیزرمن ارائه میشود. ابتدا پنجرهبندی (Windowing) معرفی شده و نمونه هایی از توابع پنجره معرفی میشوند. سپس تبدیل فوریه زمان کوتاه یا Short Time Fourier Transform STFT معرفی شده و نحوه تحلیل یک سیگال به طور همزمان در حوزه های زمان و فرکانس تشریح میشود. در ادامه، تبدیل موجک (Wavelet Transform) معرفی شده و برخی از موجکهای مادر نمونه ارائه میشوند. در انتها، پریودوگرام (Periodogram) معرفی شده و معایب آن مورد بررسی قرار میگیرد.
مدت زمان آموزش: یک ساعت و یک دقیقه
حجم فایل: 99 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و کتاب آیزرمن
پیش نمایش جلسه دهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۴ کتاب آغاز شده و بخشهای ۴-۱ و ۴-۲ کتاب ارائه میشود. ابتدا معادلات اساسی مورد نیاز مطرح میشوند. سپس سیگنالهای غیرمتناوب پله، شیب، پالسهای ساده و دوبل معرفی شده و تبدیل فوریه آنها ارائه میشود. همچنین طیف این سیگنالها باهم مقایسه شده و رفتار آنها در فرکانسهای مختلف تحلیل میشوند. در انتها، تمرین ۴-۴ کتاب حل شده و در محیط متلب پیادهسازی میشود.
مدت زمان آموزش: یک ساعت و یک دقیقه
حجم فایل: 109 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کد متلب
پیش نمایش جلسه یازدهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۴-۳ و ۴-۴ کتاب آیزرمن ارائه میشوند. ابتدا نحوه تعیین پاسخ فرکانسی از اندازهگیریها تشریح شده و سپس مثال ۴-۱ کتاب مورد بررسی قرار میگیرد. در ادامه، تاثیر نویز بر شناسایی پاسخ فرکانسی بررسی شده و راههای کاهش اثر نویز بر مدل شناسایی شده بیان میشود.
مدت زمان آموزش: یک ساعت و یازده دقیقه
حجم فایل: 111 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و کتاب آیزرمن
پیش نمایش جلسه دوازدهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۵ کتاب آغاز شده و بخشهای ۵-۱، ۵-۲، ۵-۳ و ۵-۴ کتاب آیزرمن ارائه میشوند. ابتدا نحوه تعیین پاسخ فرکانسی با سیگنالهای تست سینوسی مطرح میشود. سپس طی یک مثال نحوه انجام این کار برای یک سیستم مرتبه ۲ در محیط متلب تشریح میشود و اثر نویز بر روی شناسایی بررسی میشود. در ادامه، نحوه تعیین پاسخ فرکانسی با سیگنالهای تست مستطیلی، ذوزنقهای، چند فرکانسی و فرکانس متغیر ارائه میشود.
مدت زمان آموزش: یک ساعت و چهارده دقیقه
حجم فایل: 124 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه سیزدهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۵-۵-۱ کتاب آیزرمن ارائه میشوند. ابتدا نحوه تعیین پاسخ فرکانسی با سیگنالهای تست سینوسی با روش همبستگی بیان میشود. سپس مثال ۵-۲ کتاب مرور میشود. در ادامه دستورات ACF و CCF که به ترتیب توابع خود همبستگی و همبستگی متقابل را در محیط متلب محاسبه میکنند، معرفی میشوند. در انتها با استفاده از این دستورات، برای یک سیستم مرتبه دو پاسخ فرکانسی با روشهای شناسایی مستقیم و بر اساس همبستگی در محیط متلب محاسبه شده و نتایج در حضور نویز و بدون آن تشریح میشود.
مدت زمان آموزش: یک ساعت و چهارده دقیقه
حجم فایل: 133 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه چهاردهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۵-۵-۲ کتاب آیزرمن ارائه میشوند. ابتدا نحوه تعیین پاسخ فرکانسی با سیگنالهای تست سینوسی با روش همبستگی متعامد بیان میشود. سپس مثال ۵-۳ کتاب مرور میشود. در ادامه اثر نویز و طول دوره اندازهگیری بر شناسایی سیستم با روش همبستگی متعامد بررسی میشوند. در انتها، این روش به سیستم استاندارد مرتبه دو در محیط متلب اعمال شده و نتایج تحلیل میشود.
مدت زمان آموزش: یک ساعت و شش دقیقه
حجم فایل: 133 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کد متلب
پیش نمایش جلسه پانزدهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۶ کتاب آغاز شده و بخشهای ۶-۱ و ۶-۲ کتاب آیزرمن ارائه میشوند. ابتدا نحوه تخمین توابع خود همبستگی (ACF) و همبستگی متقابل (CCF) معرفی شده و خطای تخمین هر کدام مورد بررسی قرار میگیرد. سپس نحوه تعیین پاسخ ضربه به عنوان مدل غیرپارامتری با دیکانولوشن ACF و CCF بیان شده و برای دو حالت نویز سفید و نویز پهن باند (نویز رنگی) پاسخ ضربه محاسبه میشود. در ادامه، خطای تخمین پاسخ ضربه با روش دیکانولوشن بررسی شده و برای یک سیستم مرتبه یک این خطاها مقایسه میشود. در انتها امکان اعمال سیگنال تست در محل اغتشاش بررسی میشود.
مدت زمان آموزش: یک ساعت و چهارده دقیقه
حجم فایل: 116 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و کتاب آیزرمن
پیش نمایش جلسه شانزدهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۶-۳ و ۶-۴ کتاب آیزرمن ارائه میشوند. ابتدا سیگنالهای تصادفی باینری پیوسته یا Random Binary Signals یا RBS معرفی شده و مشخصات آن بررسی میشود. سپس سیگنال تصادفی باینری گسسته یا DRBS، سیگنال تصادفی باینری کلی یا GRBS، سیگنال باینری شبه تصادفی یا PRBS و سیگنال باینری تصادفی مدوله شده با دامنه یا APRBS معرفی شده و مورد بررسی قرار میگیرند. در همه حالتها نحوه شناسایی پاسخ ضربه سیستم به عنوان مدل غیرپارامتری سیستم بیان میشود. در انتها، شناسایی سیستم حلقه بسته با استفاده از تحلیل همبستگی مطرح میشود.
مدت زمان آموزش: یک ساعت و نوزده دقیقه
حجم فایل: 125 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و کتاب آیزرمن
پیش نمایش جلسه هفدهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل هفتم آغاز شده و بخشهای ۷-۱-۱ و ۷-۱-۲ کتاب آیزرمن ارائه میشوند. ابتدا دو روش برای تخمین تابع خود همبستگی یا ACF ارائه شده و خطای تخمین دو روش مقایسه میشود. سپس دو روش نیز برای تخمین CCF ارائه شده و خطای آنها بررسی میشوند. در انتها، برای سیگنالهای سینوسی و تصادفی این دو تخمین در محیط متلب محاسبه شده و نتایج شبیهسازی تحلیل میشوند.
مدت زمان آموزش: یک ساعت و نه دقیقه
حجم فایل: 119 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کد متلب
پیش نمایش جلسه هجدهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۷-۱-۳ و ۷-۱-۴ کتاب آیزرمن ارائه میشوند. ابتدا یک الگوریتم سریع برای محاسبه ACF و CCF با استفاده از تبدیل فوریه ارائه میشود. سپس توابع مربوط به محاسبه سریع ACF و CCF در محیط متلب ارائه شده و برای دو مثال سینوسی و تصادفی این مقادیر محاسبه میشوند. در ادامه، یک روش بازگشتی برای محاسبه CCF ارائه میشود که برای پیادهسازی آنلاین مناسب است. در انتها، در محیط متلب الگوریتم بازگشتی به سیگنالهای سینوسی و تصادفی اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و سه دقیقه
حجم فایل: 114 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کد متلب
پیش نمایش جلسه نوزدهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۷-۲ و ۷-۳ کتاب آیزرمن ارائه میشوند. ابتدا نحوه تعیین پاسخ ضربه از روش دیکانولوشن معرفی شده و مثال ۷-۱ که مربوط به شناسایی پاسخ ضربه نوسانگر سه جرمی با سیگنال PRBS است، مرور میشود. سپس اثر اغتشاش تصادفی روی تخمین پاسخ ضربه بررسی میشود. در ادامه سیگنالهای تست باینری برای سیستمهای گسسته معرفی میشوند. در انتها، تمرین ۷-۴ کتاب در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و هفت دقیقه
حجم فایل: 120 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه بیستم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۸ آغاز شده و بخشهای ۸-۱، ۸-۲ و ۸-۳ کتاب آیزرمن ارائه میشوند. ابتدا نحوه تخمین پارامترهای یک فرایند استاتیک خطی با روش حداقل مربعات (Least Square) معرفی شده و همگرایی تخمین پارامترها بررسی میشود. سپس نحوه تخمین پارامترهای یک فرایند استاتیک غیرخطی با روش حداقل مربعات (Least Square) ارائه شده و همگرایی تخمین پارامترها بررسی میشود. در انتها، تمرینات ۸-۱ و ۸-۲ کتاب در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و سه دقیقه
حجم فایل: 107 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه بیست و یکم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۸-۴ و ۸-۴ و ۸-۵ کتاب آیزرمن ارائه میشوند. ابتدا تفسیر هندسی روش حداقل مربعات تشریح میشود. سپس از روشهای Maximum Likelihood و باند کرامر رائو مساله تخمین پارامتر بررسی شده و با روش حداقل مربعات مقایسه میشود. در انتها، تمرینهای ۸-۳ و ۸-۴ در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و یک دقیقه
حجم فایل: 103 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه بیست و دوم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۹ آغاز شده و بخشهای ۹-۱-۱ و ۹-۱-۲ کتاب آیزرمن ارائه میشوند. ابتدا سه روش برای تخمین پارامتر سیستمهای گسسته با روش خداقل مربعات (LS) معرفی میشود. سپس همگرایی پارامترهای شناسایی شده به مقادیر واقعی بررسی شده و اثبات میشود که برای مدل ARX، خطای تخمین پارامتر حتی برای اندازهگیری های محدود برابر صفر است. در انتها، تمرین ۹-۱ کتاب در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و بیست و هفت دقیقه
حجم فایل: 103 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کد متلب
پیش نمایش جلسه بیست و سوم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۹-۱-۳ کتاب آیزرمن ارائه میشوند. ابتدا کواریانس خطای تخمین پارامتر و نامعینی مدل بدست آمده از اندازهگیری ها استخراج میشوند. سپس مثالهای ۹-۱، ۹-۲ و ۹-۳ کتاب (نوسانگر سه جرمی) که مربوط به شناسایی پارامتری با روش LS هستند مرور میشوند. در انتها تمرینات ۹-۲ و ۹-۳ کتاب در محیط متلب حل شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و سیزده دقیقه
حجم فایل: 122 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه بیست و چهارم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۹-۱-۵ و ۹-۱-۵ کتاب آیزرمن ارائه میشوند. ابتدا شناساییپذیری پارامتر (Parameter Identifiability) تعریف شده و شروط لازم بر روی ورودی و سیستم برای شناساییپذیری پارامترها مطرح میشوند. در ادامه، نحوه شناسایی با مقادیر DC نامعلوم ورودی و خروجی و نحوه تخمین آنها تشریح میشود. در انتها، دو روش میانگینگیری و تفاضلگیری بر روی یک سیستم مرتبه یک در محیط متلب پیاده شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و هجده دقیقه
حجم فایل: 127 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کد متلب
پیش نمایش جلسه بیست و پنجم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۹-۲ و ۹-۳ کتاب آیزرمن ارائه میشوند. ابتدا تخمین طیفی با مدلهای سیگنال پارامتری متناوب معرفی میشود و مدلها در هر دو حوزه زمان و فرکانس مورد بررسی قرار میگیرند. سپس دو روش برای تخمین پارامتر با مدل میانی غیرپارامتری معرفی میشود که در واقع غیرپارامتری هستند و نیازی به دانشتن مرتبه سیستم نیست. روش اول با میانگینگیری دادهها و سپس اعمال روش LS انجام میشود. روش دوم از توابع همبستگی به جای خود سیگنالهای ورودی و خروجی استفاده کرده و روش LS را اعمال میکند (COR-LS). در انتها مثال ۹-۵ که مربوط به پیادهسازی روش COR-LS به نوسانگر یه جرمی است، مرور میشود.
مدت زمان آموزش: یک ساعت و شانزده دقیقه
حجم فایل: 117 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و کتاب آیزرمن
پیش نمایش جلسه بیست و ششم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۹-۴ کتاب آیزرمن ارائه میشوند. ابتدا تخمین روش حداقل مربعات بازگشتی (Recursive Least Squares) یا RLS معرفی میشود و الگوریتم آن ارائه میشود. سپس نحوه تعیین شرایط اولیه تخمین و کواریانس اولیه خطای تخمین تشریح میشود. در انتها، برای دادههای یک خشک کن موجود در متلب، روش RLS اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و نوزده دقیقه
حجم فایل: 143 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کد متلب
پیش نمایش جلسه بیست و هفتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۹-۵ و ۹-۶ کتاب آیزرمن ارائه میشوند. ابتدا تخمین پارامتر بازگشتی برای مدلهای سیگنال تصادفی ارائه شده و سپس نحوه وارد کردن مقادیر DC نامعلوم تشریح میشود. در ادامه، روش حداقل مربعات وزندار (Weighted Least Squares) WLS معرفی شده و تخمین مارکوف تعریف میشود. در بخش بعد تخمین پارامتر بازگشتی با فاکتور فراموشی نمایی معرفی شده و نحوه وارد کردن قیود به روش حداقل مربعات بازگشتی بیان میشود. سپس رگولاسیون تیخونوف (Tikhonov Regularization) معرفی میشود. در انتها برای یک سیستم مرتبه یک با پارامتر متغیر با زمان، روشهای RLS و RLS با فاکتور فراموشی در محیط متلب پیاده شده و نتایج تحلیل میشود.
مدت زمان آموزش: یک ساعت
حجم فایل: 102 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کد متلب
پیش نمایش جلسه بیست و هشتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۱۰ آغاز شده و بخش ۱۰-۱ کتاب آیزرمن ارائه میشوند. ابتدا روش حداقل مربعات کلی شده (Generalized Least Squares) GLS به عنوان روشی برای حذف بایاس تخمین پارامترها برای دادههای دارای نویز همبسته (نویز رنگی) معرفی میشود. روش GLS از مدل ARARX برای تخمین پارامترها استفاده میکند. سپس الگوریتم پیادهسازی GLS ارائه میشود. در انتها، روشهای LS و GLS به دو مثال (سیستم مرتبه یک با نویز رنگی و سیستم خشککن) در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و نه دقیقه
حجم فایل: 125 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه بیست و نهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۱۰-۲ و ۱۰-۳ کتاب آیزرمن ارائه میشوند. ابتدا روش حداقل مربعات توسعه یافته Extended Least Squares) ELS) که از مدل ARMAX استفاده میکند، به عنوان روشی برای حذف بایاس تخمینها معرفی میشود. سپس الگوریتم بازگشتی (RELS (Recursive ELS به سه سیستم مرتبه یک، دو و دادههای سیستم خشک کن در محیط متلب اعمال شده و نتایج تحلیل میشوند. در ادامه، روش اصلاح بایاس Correction Least Squares) CLS) معرفی میشود. در انتها، الگوریتم تکراری CLS به یک سیستم مرتبه یک در محیط متلب اعمال شده و نتایج تحلیل میشود.
مدت زمان آموزش: یک ساعت و یک دقیقه
حجم فایل: 125 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه سی ام:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۰-۴ کتاب آیزرمن ارائه میشوند. ابتدا روش حداقل مربعات کامل (Total Least Squares) TLS معرفی میشود. سپس نحوه استخراج تخمین پارامترها با استفاده از تجزیه SVD ارائه میشود. در انتها روش TLS به یک سیستم مرتبه یک و دادههای سیستم خشک کن در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت
حجم فایل: 101 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه سی و یکم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۰-۵ کتاب آیزرمن ارائه میشوند. ابتدا متغیرهای ابزاری (Instrumental Variables) IV معرفی شده و نحوه تخمین پارامترها با استفاده از آنها تشریح میشود. سپس روشهای مختلف تعیین IV ها ارائه میشود. در ادامه الگوریتم غیربازگشتی IV و الگوریتم بازگشتی RIV ارائه میشوند. در انتها، روش غیربازگشتی IV به یک سیستم مرتبه یک و دادههای سیستم خشک کن در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: پنجاه و پنج دقیقه
حجم فایل: 107 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه سی و دوم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۰-۶ کتاب آیزرمن ارائه میشوند. ابتدا روشهای تقریب تصادفی (Stochastic Approximation) STA از جمله الگوریتم رابینز مونرو (Robbins-Monroe) و کیفر ولفوویتز (Kiefer-Wolfowitz) KW معرفی میشوند. سپس نحوه تخمین پارامترهای سیستم دینامیک با استفاده از الگوریتم KW بیان میشود. در ادامه، مثالهای ۱۰-۱ (سیستم مرتبه یک) و ۱۰-۲ (نوسانگر سه جرمی) مرور میشود. در انتها، روش KW و RLS به دادههای دو سیستم مرتبه یک و سیستم خشک کن در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: پنجاه و سه دقیقه
حجم فایل: 112 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه سی و سوم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۰-۷ کتاب آیزرمن ارائه میشوند. ابتدا الگوریتم حداقل میانگین مربعات نرمالیزه Normalized Least Mean Squares) NLMS) ارائه میشود. سپس نحوه تعیین فاکتور وزنی روش NLMS بیان میشود. در انتها، الگوریتم NLMS به سیستمهای مرتبه یک، دادههای سیستم خشک کن و دادههای مربوط به نوسانگر سه جرمی در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: پنجاه و هفت دقیقه
حجم فایل: 147 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن، توضیحات مربوط به نوسانگر سه جرمی و کدهای متلب
پیش نمایش جلسه سی و چهارم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۱۱ آغاز شده و بخشهای ۱۱-۱ و ۱۱-۲-۱ کتاب آیزرمن ارائه میشوند. ابتدا روش بیز (Bayes Method) برای تخمین پارامترهای بهینه معرفی میشود. سپس روش ML (Maximum Likelihood) معرفی شده و ارتباط آن با روش بیز، تخمینگر مارکوف،WLS و LS بیان میشود. در نهایت الگوریتم غیر بازگشتی ML برای تخمین پارامترهای سیستمهای دینامیک گسسته با مدل ARMAX ارائه میشود.
مدت زمان آموزش: یک ساعت و چهار دقیقه
حجم فایل: 105 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و مراجع اشاره شده
پیش نمایش جلسه سی و پنجم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۱۱-۲-۲ و ۱۱-۲-۳ کتاب آیزرمن ارائه میشوند. ابتدا الگوریتم بازگشتی روش ML یا RML (Recursive Maximum Likelihood) ارائه میشود. سپس باند کرامر-رائو برای روش RML محاسبه شده و با روشهای LS و MV مقایسه میشود. در انتها، روشهای RLS و RML به دادههای سیستم مرتبه یک، مرتبه دو، سیستم خشک کن و نوسانگر سه جرمی در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و یک دقیقه
حجم فایل: 129 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کد متلب
پیش نمایش جلسه سی و ششم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۲-۱ کتاب آیزرمن ارائه میشوند. ابتدا لزوم تخمین پارامترهای سیستمهای متغیر با زمان بیان شده و سپس نحوه تخمین با استفاده از فاکتور فراموشی نمایی (به عنوان حالت خاصی از WLS) تشریح میشود. سپس اثر فاکتور فراموشی بر روی ماتریس کواریانس و تخمین پارامترها بررسی شده و نحوه تعیین مقدار مناسب برای آن ارائه میشود. در انتها، روشهای RLS و RLS با فاکتور فراموشی به یک سیستم مرتبه دوم دارای پارامتر متغیر با زمان در محیط متلب اعمال شده و نتایج تحلیل میشود.
مدت زمان آموزش: یک ساعت و پنج دقیقه
حجم فایل: 137 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه سی و هفتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۱۲-۲ و ۱۲-۳ کتاب آیزرمن ارائه میشوند. ابتدا تخمین پارامتر با استفاده از فاکتور فراموشی نمایی متغیر بررسی شده و نحوه تعیین فاکتور فراموشی در هر مرحله بیان میشود. سپس این روش به یک سیستم مرتبه دوم در محیط متلب اعمال شده و نتایج با روش RLS مقایسه میشوند. در ادامه، دستکاری ماتریس کواریانس (CM (Covariance Manipulation به عنوان روشی برای همگرایی سریع پارامترها معرفی میشود. در انتها، روش CM به سیستم مرتبه دوم با پارامترهای متغیر با زمان در محیط متلب اعمال شده و نتایج با روش RLS مقایسه میشوند.
مدت زمان آموزش: پنجاه و هشت دقیقه
حجم فایل: 129 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه سی و هشتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۱۲-۴ و ۱۲-۵ کتاب آیزرمن ارائه میشوند. ابتدا مساله تخمین پارامتر بازگشتی با روش حداقل مربعات به فرم رویتگر حالت بیان شده و معادله خطای تخمین محاسبه میشود. سپس شرط همگرایی تخمینها از روی مقادیر ویژه معادله خطا استخراج میشود. سپس مقادیر مشخصه برای دادههای نوسانگر سه جرمی در محیط متلب محاسبه شده و نتایج تحلیل میشوند. در انتها، راهنمای استفاده از روشهای مختلف ارائه شده در این فصل ارائه میشود.
مدت زمان آموزش: یک ساعت
حجم فایل: 107 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کد متلب
پیش نمایش جلسه سی و نهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل سیزدهم آغاز شده و بخش ۱۳-۱ کتاب آیزرمن ارائه میشوند. ابتدا ضرورت تخمین پارامتر در حلقه بسته بیان شده و انواع روشهای شناسایی حلقه بسته شامل شناسایی غیرمستقیم (Indirect Identification) و مستقیم (Direct Identification) معرفی میشود. سپس شروط شناسایی حلقه بسته استخراج میشوند. در ادامه، نحوه شناسایی پارامترها با روش غیرمستقیم بیان میشود. در انتها، روش غیرمستقیم (با روش RLS) به یک سیستم مرتبه یک (مثال ۱۳-۱ کتاب) در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و شانزده دقیقه
حجم فایل: 125 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کد متلب
پیش نمایش جلسه چهلم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۱۳-۲ و ۱۳-۳ کتاب آیزرمن ارائه میشوند. ابتدا روش شناسایی مستقیم بدون سیگنال تست اضافی معرفی میشود. سپس مثال ۱۳-۱ کتاب با روش مستقیم و مدل ARMAX و با الگوریتمهای RELS (جلسه ۳۰) و RLS (جلسه ۲۷) در محیط متلب شناسایی شده و نتایج تحلیل میشوند. در ادامه، روش شناسایی مستقیم در حضور سیگنال تست اضافی معرفی شده و شروط شناساییپذیری آن بیان میشود. در انتها، روش مستقیم شناسایی با سیگنال تست اضافی PRBS (مدل ARMAX با الگوریتم RELS و RLS) به مثال ۱۳-۱ در محیط متلب اعمال شده و نتایج تحلیل میشود.
توجه: در ابتدای فیلم آموزشی به اشتباه جلسه اول نوشته شده است
مدت زمان آموزش: یک ساعت و یک دقیقه
حجم فایل: 112 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه چهل و یکم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۱۴ کتاب آیزرمن ارائه میشود. ابتدا مقدمه ای از اندازه فاز، قسمت حقیقی و موهومی تابع تبدیل ارائه شده و ارتباط آنها با تبدیل هیلبرت (Hilbert Transform) نشان داده میشود. سپس با استفاده از روش حداقل مربعات یک مدل تابع تبدیل پارامتری به یک سری اندازهگیری های پاسخ فرکانسی (حاصل از اندازهگیری مستقیم یا مدل غیرپارامتری میانی) تخمین زده میشود (FRLS (Frequency Response Least Squares. در انتها، تابع FRLS_fun معرفی شده و با استفاده از آن روش FRLS به یک سیستم مرتبه دوم و همچنین به اندازهگیری های پاسخ فرکانسی نوسانگر سه جرمی در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و بیست دقیقه
حجم فایل: 154 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه چهل و دوم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۱۵ کتاب آیزرمن آغاز شده و بخش ۱۵-۱ و ۱۵-۲-۱ ارائه میشوند. ابتدا روش حداقل مربعات برای تخمین پارامتری مدلهای پیوسته به صورت معادلات دیفرانسیل توسعه داده میشود. در ادامه، همگرایی تخمینهای پارامترها با مدل پیوسته مورد بررسی قرار میگیرد. سپس روش عددی برای محاسبه مشتقات مورد نیاز معرفی میشود. در انتها، روش ارائه شده بر روی داده های یک سیستم مرتبه دوم، داده های سیستم خشک کن و همچنین داده های نوسانگر سه جرمی در محیط متلب پیاده شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و بیست و یک دقیقه
حجم فایل: 160 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه چهل و سوم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۱۵-۲-۲ و ۱۵-۲-۳ کتاب آیزرمن ارائه میشوند. ابتدا فیلتر متغیرهای حالت (State Variables Filter) SVF معرفی شده و نحوه شناسایی پارامترهای مدل پیوسته با فیلتر دادهها بیان میشود. سپس فیلتر باترورث (Butterworth) به عنوان یک SVF معرفی میشود. در ادامه، روشهای مختلف تبدیل یک مدل پیوسته به مدل گسسته ارائه میشوند. همچنین فیلترهای FIR (Finite Impulse Response) جهت استفاده برای فیلتر کردن داده ها معرفی شده و مزایا و معایب آن نسبت به فیلترهای IIR (Infinite Impulse Response) (مانند فیلتر باترورٍث) بیان میشود. در انتها، با استفاده از فیلتر SVF باترورث، مدلهای پیوسته برای سیستمهای مرتبه دوم، سیستم خشک کن و نوسانگر سه جرمی در متلب محاسبه شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و شانزده دقیقه
حجم فایل: 150 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه چهل و چهارم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۵-۳ کتاب آیزرمن ارائه میشوند. ابتدا نحوه استفاده از متغیرهای ابزاری IV که در جلسه ۳۲ (بخش ۱۰-۵) به عنوان یک روش تخمین پارامتر سازگار برای مدلهای گسسته معرفی شد، برای استخراج پارامترهای سازگار مدلهای پیوسته بیان میشود. سپس ترکیب روش همبستگی و حداقل مربعات COR-LS برای تخمین سازگار پارامترهای مدلهای پیوسته ارائه میشود (که در جلسه ۲۶ برای مدلهای گسسته معرفی شده بود). در ادامه، نحوه استخراج یک مدل پیوسته به صورت غیر مستقیم و از مدل گسسته بدون بایاس تشریح میشود. در انتها، روش COR-LS به یک سیستم مرتبه دوم، سیستم خشک کن و نوسانگر سه جرمی در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و پنج دقیقه
حجم فایل: 126 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، کتاب آیزرمن و کدهای متلب
پیش نمایش جلسه چهل و پنجم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۱۵-۴ و ۱۵-۵ کتاب آیزرمن ارائه میشوند. ابتدا نحوه تخمین پارامترهای فیزیکی مدلهای پیوسته بیان میشود. سپس نحوه تخمین پارامترهای نامعلوم یک مدل پیوسته که برخی از پارامترهای آن معلوم است، تشریح میشود. در انتها، پارامترهای فیزیکی نوسانگر سه جرمی در محیط متلب شناسایی شده و نتایج تحلیل میشود.
مدت زمان آموزش: یک ساعت و نه دقیقه
حجم فایل: 123 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه چهل و ششم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۱۶ آغاز شده و بخش ۱۵-۴ و ۱۵-۵ کتاب آیزرمن ارائه میشوند. ابتدا مدل فضای حالت گسسته در نظر گرفته شده و پاسخ بازگشتی آن ارائه میشود. سپس ماتریسهای رویتپذیری و کنترلپذیری توسعه یافته و پارامترهای مارکوف معرفی میشوند. در انتها ماتریسهای هنکل بر اساس دادههای ورودی و خروجی تشکیل داده شده و مفروضات روش زیرفضا بر حسب آنها بیان میشوند.
مدت زمان آموزش: یک ساعت و هفت دقیقه
حجم فایل: 124 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و مراجع اشاره شده
پیش نمایش جلسه چهل و هفتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۶-۲ و ۱۶-۳ کتاب آیزرمن ارائه میشوند. ابتدا مفهوم زیرفضا، تصویرسازی متعامد (Orthogonal Projection) و تصویرسازی مورب (Oblique Projection) معرفی میشوند. سپس از تصویرسازی مورب استفاده کرده و یک مدل فضای حالت برای دادههای اندازهگیری شده استخراج میشود. همچنین دو روش برای پیدا کردن ماتریس P معرفی میشوند: ابتدا روش (N4SID (Numerical algorithms for SubSpace State Space IDentification معرفی شده و سپس روش (MOESP (Multi-variable Output Error State sPace معرفی میشود که از تجزیه QR استفاده میکند.
مدت زمان آموزش: یک ساعت و ده دقیقه
حجم فایل: 126 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و مراجع اشاره شده
پیش نمایش جلسه چهل و هشتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه نحوه پیادهسازی روش شناسایی زیرفضا در محیط متلب ارائه میشوند. ابتدا نحوه محاسبه فضای پوچی، تجزیه QR و تجزیه SVD در محیط متلب تشریح میشوند. سپس نحوه شناسایی مدلهای تصادفی دارای نویز فرایند و اندازهگیری فضای حالت گسسته ارائه میشود. در ادامه دستور (تابع) SUBID برای شناسایی مدل فضای حالت گسسته از اندازهگیری ها با روش زیرفضا معرفی میشود. در انتها، روش زیرفضا با دستور SUBID به دادههای یک سیستم مرتبه سوم، داده های خشک کن و نوسانگر سه جرمی اعمال شده و نتایج تحلیل میشوند. همچنین روش زیرفضا به یک مدل مرتبه ۹ با ۲ ورودی و ۲ خروجی اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و نوزده دقیقه
حجم فایل: 193 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه چهل و نهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۱۶-۴، ۱۶-۵ و ۱۶-۶ کتاب آیزرمن ارائه میشوند. ابتدا رابطه بین پاسخ ضربه یک سیستم گسسته با ماتریسهای فضای حالت استخراج میشود. سپس الگوریتم شناسایی ماتریسهای فضای حالت گسسته با استفاده از پاسخ ضربه سیستم با روش Ho-Kalman ارائه میشود. در انتها، دستور HoKalman معرفی شده و با استفاده از آن برای دو سیستم SISO و MIMO مدل فضای حالت در محیط متلب استخراج شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و ده دقیقه
حجم فایل: 132 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه پنجاهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۱۷ آغاز شده و بخشای ۱۷-۱ و ۱۷-۲ کتاب آیزرمن ارائه میشوند. ابتدا برخی روشهای شناسایی سیستمهای دارای چند ورودی و چند خروجی معرفی میشوند. سپس مدلهای تابع تبدیل مانند فرم کانونیکال P و فرم کانونیکال P ساده شده و همچنین نمایش چندجملهای ماتریسی برای شناسایی سیستمهای MIMO معرفی میشوند. در ادامه، مدلهای فضای حالت و خصوصا فرمهای کانونیکال رویتپذیری و کنترلپذیری برای سیستمهای MIMO معرفی شده و ارتباط آنها با پارامترهای مارکوف بیان میشوند. در انتها، مدلهای ورودی-خروجی برای سیستمهای MIMO معرفی میشوند.
مدت زمان آموزش: یک ساعت و یازده دقیقه
حجم فایل: 107 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و مراجع اشاره شده
پیش نمایش جلسه پنجاه و یکم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۱۷-۳، ۱۷-۴ و ۱۷-۵-۱ کتاب آیزرمن ارائه میشوند. ابتدا مدلهای پاسخ ضربه و پارامترهای مارکوف معرفی میشوند. سپس روش شناسایی متوالی (Subsequent Identification) برای شناسایی سیستمهای MIMO معرفی میشود. در ادامه، روش شناسایی متوالی به یک سیستم دو ورودی دو خروجی در محیط متلب اعمال شده و نتایج تحلیل میشوند. همچنین، روش دیکانولوشن (Deconvolution) که از توابع همبستگی برای شناسایی سیستمهای MIMO استفاده میکند، ارائه میشود. در نهایت، روش دیکانولوشن به یک سیستم دو ورودی دو خروجی در محیط متلب اعمال شده و پارامترهای مارکوف و پاسخ ضربه آن شناسایی شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و یازده دقیقه
حجم فایل: 134 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه پنجاه و دوم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۷-۵ و ۱۷-۶ کتاب آیزرمن ارائه میشوند. ابتدا نحوه تولید سیگنالهای تست متعامد از طریق ماتریس هادامارد (Hadamard Matrix) بیان شده و با استفاده از این روش و روش شیفت چرخشی، سیگنالهای ورودی در محیط متلب تولید شده و توابع ACF و CCF آنها محاسبه میشوند. سپس نحوه شناسایی سیستمهای MIMO با استفاده از این ورودیهای تست متعامد از طریق روش حداقل مربعات تشریح میشود. در ادامه، این روش به یک سیستم دو ورودی دو خروجی در محیط متلب اعمال شده و نتایج تحلیل میشوند. در انتها روشها و ساختارهای مختلف از جمله ترکیب روش حداقل مربعات و همبستگی برای سیستمهای MIMO تشریح و مقایسه میشوند.
مدت زمان آموزش: یک ساعت و یازده دقیقه
حجم فایل: 198 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه پنجاه و سوم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۱۸ آغاز شده و بخش ۱۸-۱ کتاب آیزرمن ارائه میشوند. ابتدا سریهای ولترا (Volterra Series)، مدل همرشتاین کلی شده و ساده (Hammerstein Model)، مدل وینر (Wiener Model) و مدل لچمن (Lachmann Model) برای شناسایی سیستمهای غیرخطی معرفی میشوند. سپس نحوه تخمین پارامترهای سیستم غیرخطی با مدلهای مختلف مقایسه شده و نحوه استفاده از روش حداقل مربعات برای تخمین پارامترها بررسی میشود. در ادام، شرط شناساییپذیری سیستمهای غیرخطی تشریح میشود. در انتها، مثال ۱۸-۱ کتاب مرور میشود.
مدت زمان آموزش: یک ساعت و چهار دقیقه
حجم فایل: 137 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و مراجع اشاره شده
پیش نمایش جلسه پنجاه و چهارم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه نحوه پیادهسازی روشهای همرشتاین و آرکتانژانت در محیط متلب ارائه میشوند. ابتدا تابع Hammer_fun جهت شناسایی با مدل همرشتانی در متلب معرفی میشود. سپس تابع atan_fun جهت شناسایی سیستمهای غیرخطی دارای اشباع ورودی با روش آرکتانژانت در محیط متلب معرفی میشود. در انتها، این دو روش به یک سیستم مرتبه دوم در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و سی و شش دقیقه
حجم فایل: 225 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه پنجاه و پنجم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۸-۲ کتاب آیزرمن ارائه میشوند. ابتدا مدلهای مختلف اصطکاک خشک و ویسکوز از جمله نمودار Stribeck معرفی شده و نحوه پارامتریسازی مدل غیرخطی با این مدلها تشریح میشود. سپس مدل ناحیه مرده (Dead Zone) که میتواند ناشی از لقی موجود در سیستم باشد، معرفی شده و نحوه استفاده از آن در مدل دینامیک ارائه میشود. در ادامه یک روش تکراری معرفی میشود که با آن میتوان ناحیه مرده سیستم را به همراه پارامترهای قسمت خطی سیستم شناسایی کرد. در انتها، روش پیشنهادی به همراه روشهای حداقل مربعات و همرشتاین به یک سیستم مرتبه دوم در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و سی و هشت دقیقه
حجم فایل: 223 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه پنجاه و ششم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه فصل ۱۹ آغاز شده و بخشهای ۱۹-۱ و ۱۹-۲ کتاب آیزرمن ارائه میشوند. ابتدا لزوم استفاده از الگوریتمهای بهینهسازی تکراری (Iterative Optimization) جهت شناسایی سیستمهای دینامیک بیان میشود. سپس پیکربندیهای مختلف شناسایی با استفاده از الگوریتمهای بهینهسازی غیرخطی معرفی میشوند. در ادامه، توابع هزینه مختلف معرفی شده و باهم مقایسه میشوند. در انتها، روشهای بهینهسازی مختلف دستهبندی شده و صورت مساله تعریف میشود.
مدت زمان آموزش: پنجاه و هفت دقیقه
حجم فایل: 140 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و مراجع اشاره شده
پیش نمایش جلسه پنجاه و هفتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۹-۳ کتاب آیزرمن که مربوط به روشهای بهینهسازی غیرخطی تکبعدی است، ارائه میشوند. ابتدا الگوریتمهای تخمین نقطه (Point Estimation Algorithm)، حذف ناحیه (Region Elimination Algorithm) و جست و جوی ناحیه طلایی (Golden Section Search) به عنوان روشهای مرتبه صفر معرفی شده و به یک مثال در محیط متلب اعمال شده و نتایج تحلیل میشوند. سپس الگوریتم دوبخشی (Bisection Algorithm) به عنوان یک روش مرتبه اول معرفی شده و به مثال اسکالر در محیط متلب اعمال شده و نتایج تحلیل میشوند. در انتها، روش نوتن-رافسون (Newton-Raphson) به عنوان یک روش مرتبه دوم ارائه شده و به مثال اسکالر در محیط متلب اعمال شده و نتایح تحلیل میشود.
مدت زمان آموزش: یک ساعت و سه دقیقه
حجم فایل: 172 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه پنجاه و هشتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۱۹-۴-۱ و ۱۹-۴-۲ کتاب آیزرمن ارائه میشوند. ابتدا روش Downhill Simplex algorithm یا DSA به عنوان یک روش بهینهسازی چندبعدی معرفی شده و الگوریتم آن ارائه میشود. سپس روش DSA به یک سیستم مرتبه یک پیوسته در محیط متلب اعمال شده و پارامترهای آن شناسایی میشوند. در ادامه، روش گرادیان کاهشی (Gradient Descent) یا (Steepest Descent) به عنوان یک روش مرتبه یک معرفی شده و الگوریتم آن ارائه میشود. در انتها، روش گرادیان کاهشی به همان سیستم مرتبه اول پیوسته در محیط متلب اعمال شده و پارامترهای آن شناسایی میشوند.
مدت زمان آموزش: یک ساعت و چهارده دقیقه
حجم فایل: 180 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه پنجاه و نهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۹-۴-۳ کتاب آیزرمن ارائه میشوند. ابتدا الگوریتم نیوتن معرفی شده و از آن برای یافتن نقطه مینیمم تابع روزنبروک (Rosenbrock Function) در محیط متلب استفاده میشود. سپس الگوریتم شبه نیوتن شامل DFP (Davidon, Fletcher, Powell) و BFGS (Broyden, Fletcher, Goldfarb, Shanno) ارائه شده و به تابع روزنبروک در محیط متلب اعمال میشوند. سپس روشهای گوس نیوتن و لونبرگ مارکوارت (Levenberg-Marquart) ارائه میشوند. در انتها، این دو روش به یک سیستم مرتبه یک در محیط متلب اعمال شده و پارامترهای آن شناسایی میشوند.
مدت زمان آموزش: یک ساعت و یازده دقیقه
حجم فایل: 184 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه شصتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۹-۵ کتاب آیزرمن ارائه میشوند. ابتدا روشهای مینممسازی بدون قید متوالی Sequential Unconstrained Minimization Technique) SUMT) از طریق اضافه کردن تابع جریمه به تابع هزینه معرفی میشود. در ادامه، توابع جریمه مختلف از جمله تابع جریمه خارجی (Exterior Penalty Function)، تابع جریمه داخلی (Interior Penalty Function)، تابع جریمه داخلی توسعه یافته (Extended Interior Penalty Function)، تابع جریمه داخلی توسعه یافته کوادراتیک (Quadratic Extended Interior Penalty Function) و تابع جریمه Infinite Barrier معرفی میشوند. سپس روش DSA با توابع جریمه خارجی، داخلی وInfinite Barrier به یک سیستم مرتبه اول با دو پارامتر نامعلوم در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و نوزده دقیقه
حجم فایل: 183 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه شصت و یکم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۱۹-۶، ۱۹-۷ و ۱۹-۸ کتاب آیزرمن ارائه میشوند. ابتدا روشهای خطای پیشبینی (Prediction Error Methods) با استفاده از بهینهسازی تکراری معرفی میشوند. سپس نحوه تعیین عددی مشتقات اول و دوم سیگنالهای اندازهگیری شده تشریح میشود. در ادامه، نحوه تعیین عددی مشتقات درایههای ماتریسهای فضای حالت نسبت به پارامترها ارائه میشود. در انتها، نحوه تعیین کواریانس خطای پارامترها بر اساس کواریانس خروجی بیان میشود.
مدت زمان آموزش: پنجاه و سه دقیقه
حجم فایل: 136 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و مراجع اشاره شده
پیش نمایش جلسه شصت و دوم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۲۳-۱ و ۲۳-۲ کتاب آیزرمن ارائه میشوند. ابتدا نحوه انتخاب سیگنالهای ورودی بررسی میشوند. سپس نحوه انتخاب نرخ نمونهبرداری دادههای اندازهگیری معرفی میشوند. در انتها با استفاده از روش حداقل مربعات ، برای یک سیستم مرتبه اول و دوم اثر تغییر نرخ نمونهبرداری در محیط متلب بر روی تخمینها بررسی شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و چهارده دقیقه
حجم فایل: 180 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه شصت و سوم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۲۳-۳ کتاب آیزرمن ارائه میشوند. ابتدا نحوه تعیین تاخیر زمانی مدل تشریح شده و سپس تابع LSTD_fun برای اینکار معرفی میشود. سپس این روش به یک سیستم مرتبه دو در محیط متلب اعمال شده و نتایج تحلیل میشوند. در ادامه، روشهای مختلف تعیین مرتبه مدل از جمله تابع هزینه، رتبه ماتریس اطلاعات، ماندهها و تست قطب و صفر معرفی میشوند. در انتها، برخی از این روشها به یک سیستم مرتبه دوم و نوسانگر سه جرمی در محیط متلب اعمال شده و نتایج تحلیل میشوند.
مدت زمان آموزش: یک ساعت و چهارده دقیقه
حجم فایل: 172 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه شصت و چهارم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۲۳-۴ کتاب آیزرمن ارائه میشوند. ابتدا مدلهای مختلف نویز و روشهای مربوطه ارائه شده در کتاب خلاصه شده و مفروضات از پیش تعیین شده مقایسه میشوند. سپس روشهای تخمین غیربازگشتی تک به تک بررسی شده و مزایا و معایب هر کدام بیان میشود. در انتها، مزایا و معایب روشهای شناسایی بازگشتی ارائه شده در کتاب بیان میشوند.
مدت زمان آموزش: یک ساعت و چهار دقیقه
حجم فایل: 127 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس و مراجع اشاره شده
پیش نمایش جلسه شصت و پنجم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخش ۲۳-۵ کتاب آیزرمن ارائه میشوند. ابتدا ۵ روش برای شناسایی پارامتری سیستمهای گسسته دارای انتگرالگیر خالص معرفی میشوند. در ادامه، ۴ روش از این ۵ روش بر روی یک سیستم مرتبه دو در محیط متلب پیاده شده و نتایج تحلیل میشوند.
مدت زمان آموزش: پنجاه و هشت دقیقه
حجم فایل: 130 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه شصت و ششم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه بخشهای ۲۳-۶، ۲۳-۷، ۲۳-۸ و ۲۳-۹ کتاب آیزرمن ارائه میشوند. ابتدا اثر اغتشاش در ورودی بررسی شده و روش مواجهه با آن بیان میشود. سپس اغتشاشات فرکانس پایین مانند دریفت و اغتشاشات فرکانس بالا مانند نویز اندازهگیری بررسی شده و راهکارهای گرافیکی و تحلیلی مقابله با آنها ارائه میشوند. در ادامه، نحوه صحتسنجی مدل بدست آمده برای مدلهای پارامتری و غیرپارامتری مورد بررسی قرار میگیرند. در انتها، روش LS به یک سیستم مرتبه دوم در محیط متلب اعمال شده و مدل بدست آمده با بررسی گشتاورهای خطا صحتسنجی میشود.
مدت زمان آموزش: یک ساعت
حجم فایل: 135 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه شصت و هفتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه تولباکس شناسایی متلب معرفی میشود. ابتدا مثال نوسانگر سه جرمی به اختصار توضیح داده شده و از آن به عنوان دادههای مورد شناسایی برای آموزش تولباکس استفاده میشود. سپس نحوه وارد کردن داده ها در محیط تولباکس تشریح میشود. در ادامه، امکانات مختلف پیش پردازش تولباکس معرفی شده و روی داده های نوسانگر اعمال میشوند. همچنین نحوه ارزیابی اولیه دادههای اندازهگیری و مقایسه خروجیهای مدلهای مختلف آموزش داده میشود. در انتها، نحوه استخراج مدل به محیط کاری متلب بیان میشود.
مدت زمان آموزش: یک ساعت و هجده دقیقه
حجم فایل: 277 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه شصت و هشتم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه شناسایی سیستمهای خطی با تولباکس شناسایی متلب ارائه میشود. ابتدا نحوه ذخیرهسازی پروژه در محیط GUI بیان میشود. سپس نحوه شناسایی مدل تابع تبدیل پیوسته و گسسته توسط تولباکس بیان شده و برای نوسانگر سه جرمی مدلهای تابع تبدیل استخراج میشود. در ادامه، نحوه شناسایی مدل فضای حالت پیوسته و گسسته توسط تولباکس بیان شده و برای نوسانگر سه جرمی مدلهای فضای حالت استخراج میشود. همچنین نحوه شناسایی مدل چندجملهای از جمله ARX، ARMAX، OE و BJ توسط تولباکس بیان شده و برای نوسانگر سه جرمی مدلهای مختلف استخراج میشود. در نهایت نحوه بهینهسازی بیشتر مدلهای بدست آمده تشریح میشود.
مدت زمان آموزش: یک ساعت و هشت دقیقه
حجم فایل: 277 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه شصت و نهم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
در این جلسه شناسایی سیستمهای غیرخطی و MIMO با تولباکس شناسایی متلب ارائه میشود. ابتدا با استفاده از تولباکس شناسایی متلب دو مدل غیرخطی ARX و همرشتاین-وینر برای نوسانگر سه جرمی استخراج شده و با مدلهای خطی مقایسه میشوند. سپس برای یک فرایند خطی تاخیردار، یک مدل فرایند در محیط متلب استخراج شده و نتایج تحلیل میشوند. در انتها، نحوه استخراج مدل MIMO در تولباکس شناسایی متلب تشریح شده و به یک سیستم دو ورودی دو خروجی اعمال میشود.
مدت زمان آموزش: چهل و نه دقیقه
حجم فایل: 153 مگابایت
محتویات درس: فیلم با کیفیت ۷۲۰p، پاورپوینت درس، مراجع اشاره شده و کدهای متلب
پیش نمایش جلسه هفتادم:
تمام پیش نمایشها دارای کیفیت ۷۲۰p هستند ولی ممکن است به علت سرعت کم اینترنت شما با کیفیت پایینتر نمایش داده شوند.
از نوار پایین و سمت راست میتوانید کیفیت نمایش دلخواه را انتخاب کنید
مطالعه بیشتر
- لینک دانلود فایل بلافاصله بعد از پرداخت وجه به نمایش در خواهد آمد.
- همچنین لینک دانلود به ایمیل شما ارسال خواهد شد به همین دلیل ایمیل خود را به دقت وارد نمایید.
- ممکن است ایمیل ارسالی به پوشه اسپم یا Bulk ایمیل شما ارسال شده باشد.
- در صورتی که به هر دلیلی موفق به دانلود فایل مورد نظر نشدید با ما تماس بگیرید.



mojtaba
با سلام بنده فصل یک را خریداری کردم
منظر از الگوریتم شناسایی چیست؟ و کدام قسمت از فصل اول را شامل می شود؟
علی جوادی
سلام
الگوریتمهای شناسایی به تدریج در فصلهای بعدی مطرح شده اند.
فصل یک صرفا مقدمه هست.
فهرست موضوعی رو ببینید
بهزاد
با عرض سلام و احترام
جسارتا میخواستم بپرسم در مورد استخراج دینامیکهای موثر در یک مدل در این آموزش بحث شده؟
علی جوادی
سلام
اگه منظورتون مدلسازی تحلیلی سیستم با استفاده از قوانین حاکم بر سیستم باشه، خیر بحث نشده.
در این مجموعه صرفا روشهای استخراج مدل بر اساس داده های خروجی مطرح شده
امیر
سلام مجدد خدمت دکتر جوادی عزیز ، درباره BLUE مطلبی که استادم تدریس کردن توضیحش به این صورت هست که Best Of Linear Unbiased System ، روش حداقل مربعات بهترین تخمینگر بدون بایاس خطی است.
علی جوادی
فکر میکنم منظورتون Best Linear Unbiased Estimator باشه.
این بحث اولین بار در جلسه 22 برای سیستمهای استاتیک مطرح شده و بعد در فصل 9 برای سیستمهای دینامیک بررسی شده.
امیر
با عرض سلام و احترام ، ممنونم بابت آموزش بسیار خوب و جامعی که در اختیار ما قرار دادین. جسارتا می خواستم بپرسم روش BLUE هم در این ۀموزش بحث شده و اگر بحث شده در کدوم جلسه هست ؟
علی جوادی
با سلام و تشکر از لطف شما
من این روش رو تا حالا نشنیدم و نمیدونم BLUE مخفف چه عبارتی هست.
یادم نمیاد جزو سرفصلهای کتاب هم بوده باشه
محمد
سلام منظور از efficient در شناسایی سیستم چیه؟
علی جوادی
داخل فیلمها اشاره شده (اگه شده کدوم جلسه و کدوم دقیقه) یا در کتاب دیدید (کدوم صفحه)؟
محمد
سلام شبیه سازی Maximum Likelihood کدوم جلسه هست؟
علی جوادی
سلام. جلسات 35 و 36
محمد
سلام ببخشید امکانش هست مراحل بدست آوردن Covariance function ARMA را توضیح بدین
علی جوادی
سلام
اگر منظورتون کواریانس خطای تخمین مدل ARMA باشه، در ابتدای جلسه 28 بحث شده
حمید
با سلام و عرض تبریک سال نو
آیا در این مجموعه در خصوص شناسایی سیستم تحت تحریک ارتعاشات محیطی (َambient vibration) و ورودی نامعلوم مطالبی ارائه شده است؟ سپاسگزارم
علی جوادی
سلام. سال نوی شما هم مبارک
من در مورد تحریک ارتعاشات محیطی اطلاعی ندارم.
البته میتونید روشهای گفته شده رو پیاده کنید ببینید نتایج در حد قابل قبول هست یا نه.
موفق باشید
sara
باسلام و خسته نباشید ببخشید در قسمت55 ایا همرشتاین و آرکتانژانت یک روش شناسایی هستند؟یا یک مدل هستند؟
علی جوادی
سلام
همرشتاین یک مدل هست.
آرکتانژانت هم یک مدل ابتکاری است که میتونیم اسمشو مدل آرکتانژانت بذاریم یا هر چیزی که دوست داشتید.
البته ممکنه از عبارت “روش همرشتاین” استفاده بشه ولی منظور از این عبارت اینه که از مدل همرشتاین استفاده شده.
سارا
باعرض سلام وخسته نباشید وتشکر بابت فیلم های بسیار مفیدتون ببخشید شناسایی سیستم های همرشتاین براساس RML کدوم قسمت ازفیلم هاتون میشه ممنونم
علی جوادی
سلام و تشکر از لطف شما
هفته بعد فصل 18 آپلود میشه که داخلش مدل همرشتاین ارائه شده.