مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
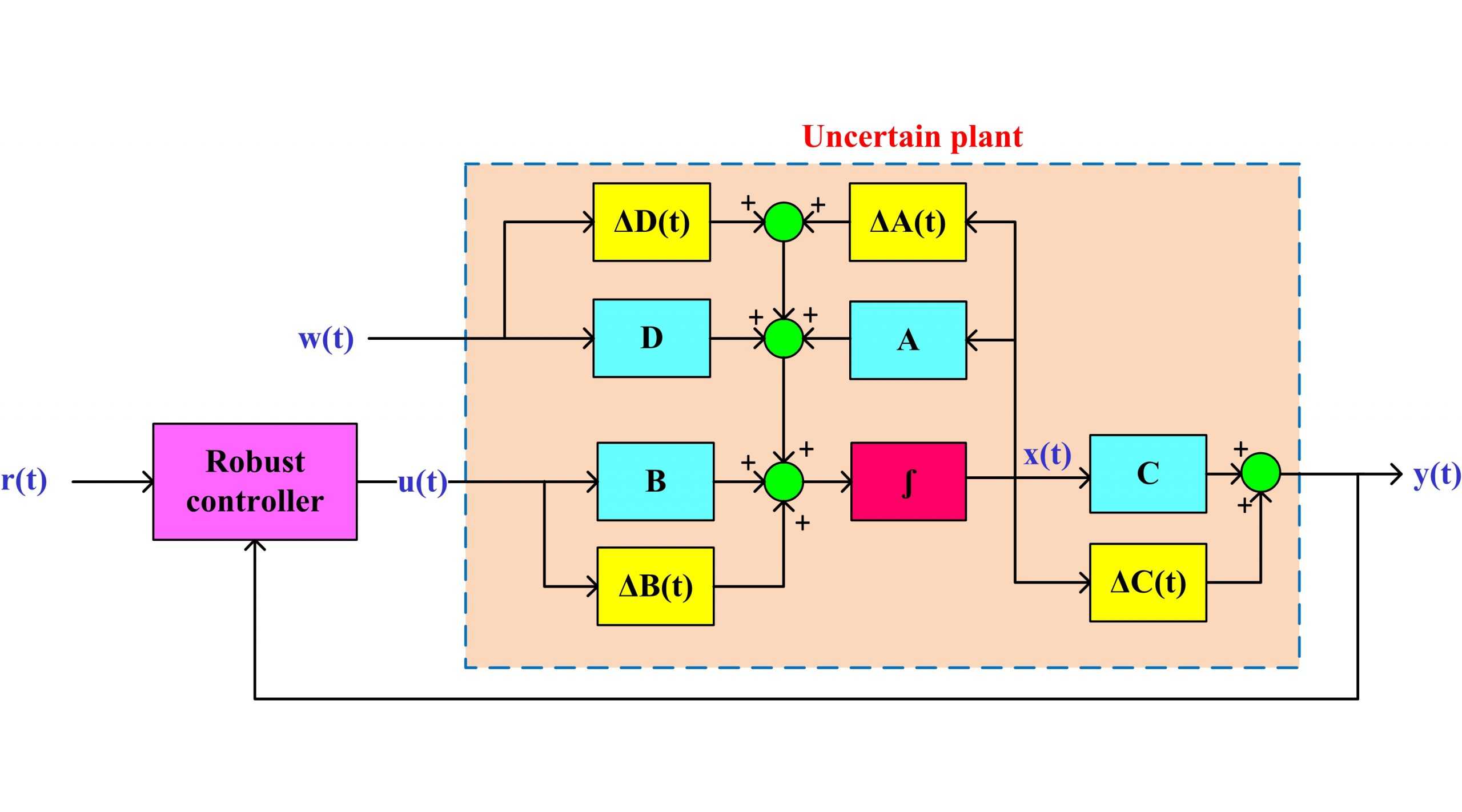
عملکرد بسیاری از سیستمهای کاربردی تحت تاثیر نامعینی پارامترهای سیستم و اغتشاشات خارجی قرار دارد. از طرف دیگر در خیلی از سیستمها امکان اندازهگیری تمام حالتها وجود ندارد، چه به خاطر نبود سنسور مناسب و چه به خاطر هزینه بالای سنسورها. بنابراین اگر یک کنترل کننده بتواند با کمترین تعداد سنسور سیستم نامعین و تحت اغتشاش را کنترل کند، میتواند برای بهبود عملکرد بسیاری از سیستمها مورد استفاده قرار گیرد. تاکنون نحوه مواجهه با عوامل مخربی مانند اغتشاش خارجی و نامعینی جداگانه در سری فیلمهای مختلف موجود در سایت مورد بررسی قرار گرفتهاند. به طور خاص فیلمهای آموزشی مربوط به کنترل سیستمهای خطی تحت نامعینی پارامتری و اغتشاش خارجی با فیدبک حالت؛ کنترل مقاوم سیستمهای خطی تحت نامعینی پارامتری با فیدبک خروجی و کنترل مقاوم ∞H سیستمهای خطی تحت نامعینی اغتشاش با فیدبک خروجی در سایت موجود هستند. در این سری جلسات قرار است همه این عوامل یکجا در نظر گرفته شده و سیستمهای خطی دارای نامعینی و اغتشاش تنها با فیدبک تعدادی از حالتها کنترل شود و نامساویهای مربوط به این مساله استخراج شود. یکی از مزایای این کنترل کننده این است که مثل رویتگر لیونبرگر نیازی به ورودی سیستم و استفاده مستقیم از ماتریسهای سیستم حلقه باز نداشته و فقط از خروجی سیستم استفاده میکند تا به اهداف مورد نظر برسد. البته کلیت این مساله نباید باعث شود که در تمام موارد از این روش استفاده شود؛ به خاطر اینکه ممکن است اثر نامعینی یا اغتشاش در یک سیستم خیلی کم بوده و قابل صرف نظر کردن باشد. بنابراین با توجه به اهمیت این عوامل و تعداد سنسورها میتوان روش مناسب رو انتخاب کرد. برای جا افتادن مطلب، روش پیشنهادی روی یک مدل یک چهارم سیستم تعلیق هم پیاده شده و نتایج بدست آمده از کنترل کننده مقاوم با سناریوهای مختلف و تحت نامعینی ها و اغتشاشات متفاوت با نتایج سیستم کنترل تعلیق غیر فعال مقایسه میشود.
پیشنیازها: آشنایی اولیه با جبر خطی و تئوری پایداری لیاپونوف – آشنایی با کدنویسی در محیط متلب – آشنایی با نامساویهای ماتریسی خطی (LMI)
قبل از دیدن ادامه پست، راهنمای استفاده از سری فیلمهای کنترل مقاوم را حتما ببینید:
جلسه اول:
فرمولبندی طراحی کنترل مقاوم فیدبک خروجی برای سیستمهای دارای اغتشاش خارجی و نامعینی پارامتری
جلسه دوم:
استخراج LMI های مورد نیاز با استفاده از مکمل شور و تبدیل متجانس
پیادهسازی کنترلکننده مقاوم بر روی سیستم تعلیق فعال خودرو و شبیهسازی در متلب
شبیهسازی در محیط سیمولینک و تحلیل در حوزه فرکانس
قیمت اصلی: ۵۷۶,۰۰۰ تومان بود.۳۵۷,۶۰۰ تومانقیمت فعلی: ۳۵۷,۶۰۰ تومان.Add to cart
جلسه سوم:
جلسه چهارم: