 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
با توجه به قابلیتهای بالای نرم افزار Matlab و Simulink در طراحی و تحلیل سیستمهای کنترل، در صورتی که از نرم افزار Matlab در کنار یادگیری درس کنترل خطی استفاده شود، در درک مفاهیم کنترلی تاثیر بسازی خواهد داشت.
در این پست آموزش کنترل مدرن قرار داده می شود. آقای دکتر مصطفی اسداللهی رتبه اول کنکور کارشناسی ارشد و کنکور دکتری برق – کنترل این مجموعه ارزشمند رو تدریس خواهند کرد. این مجموعه در حال آماده سازی می باشد و هفته دوم فروردین به مرور بر روی سایت قرار خواهد گرفت.

این پاورپوینت در مورد کنترل نیرو در ربات بحث می کند. ابتدا دلیل استفاده از کنترل نیرو در ربات ها بیان شده…
در این پست آموزش کنترل خطی قرار داده خواهد شد. آموزش های زیادی در زمینه آموزش کنترل خطی توی اینترنت وجود داره….
بطور کلی روش حساب تغییرات به مساله غیر خطی با شرایط حدی در دو نقطه مجزا منتهی می شود که برای بدست آوردن قانون کنترل بهینه و یا حتی یک کنترل بهینه حلقه باز نمی تواند بصورت تحلیلی حل شود.

Adaptive control of uncertain nonlinear systems using mixed backstepping and Lyapunov redesign techniques کنترل تطبیقی سیستم های غیرخطی نامعین با استفاده از…
در این پست اکثر شبیه سازی مثال های کنترل تطبیقی استروم (Astrom) رو قرار دادم. شما می تونید هر مثالی که مد…
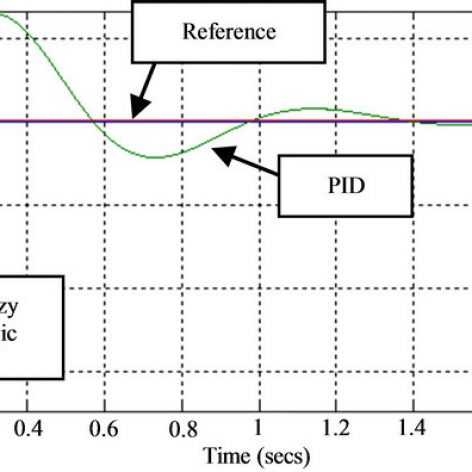
روش فازی یکی از روش هاییه که با روش های تحلیلی زیادی تلفیق میشه. یکی از روش هایی که پایه تمام روش…
Robust control using incremental sliding mode for under-actuated systems with mismatched uncertainties این مقاله در ارتباط با یک روش جدید مد لغزشی…
تمرینات کتاب کنترل غیرخطی اسلاتین به مرور زمان در همین پست قرار داده می شوند. تمرینات فصل دوم رو که به طور…
فصل اول: 5-6-8-11-14-20 فصل دوم: 1-2-3-4-5-6-7-8-9-10-11-14-15-16 فصل سوم: 1-2-3-6-7-8-12-15-16-17 فصل چهارم: 1-2-3-4-5-6-7-10 فصل پنجم: 1-2-3-4-6-7-8-9-11-12 فصل هفتم: 9 درصورتیکه تمرینات دیگری مد…
روش کنترلی backstepping در کشور ما با عناوین گام به عقب، بازگشت به عقب و پسگام نام گذاری شده است. این روش کنترلی یک روش کلاسیک و تحلیلی می باشد. روش گام به عقب یکی از روش های کنترلی مقاوم می باشد.
این مقاله در ارتباط با طراحی یک روش طراحی کنترلی مقاوم و غیر خطی برای یک کانورتر dc to dc می باشد. هدف در این مقاله تنظیم ولتاژ می باشد. کنترل کننده غیرخطی طراحی شده یک کنترل کننده مقاوم بر اساس تابع لیاپانوف می باشد.
