در این جلسه سیستم کوادروتور از لحاظ سخت افزاری و عملکردی به طور کامل توضیح داده می شود. این جلسه تحت عنوان پیش درامدی بر کوادروتور ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
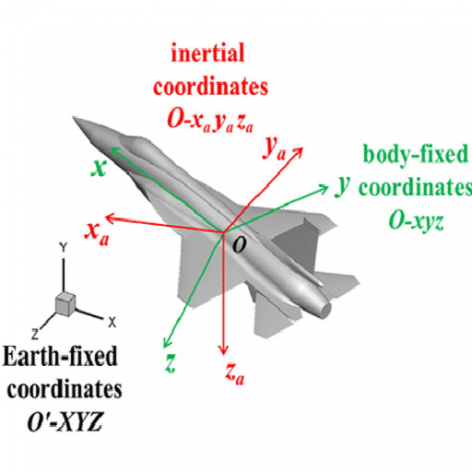
در این جلسه مفهوم پایه ای عملکرد سیستم کوادروتور، معرفی محورهای فرضی حاکم بر سیستم، نحوه انتقال از فریم بدنه به فریم اینرسایی و بالعکس و همچنین نحوه استخراج معادلات دینامیکی موتورهای براشلس DC مورد استفاده در سیستم کوادروتور به طور کامل توضیح داده می شود. . این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (1) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی کوادروتور شامل متغیرهای حالت سیستم به طور کامل بررسی می شود. در ادامه معادلات دینامیکی حاکم بر سیستم کوادروتور از طریق دو روش نیوتن-اویلر و همچنین اویلر-لاگرانژ به صورت جداگانه و به تفصیل توضیح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (2) ارایه می شود.
مدت زمان: 53 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه مدل ریاضی سیستم کوادروتور از منظری دیگر مورد بررسی قرار می گیرد و مدلسازی سیستم کوادروتور بر مبنای تعاریف علم سینماتیک و علم دینامیک انجام و معادلات ریاضی سیستم استخراج می گردد . در ادامه نیروها و گشتاورهای وارد بر سیستم کوادروتور به طور کامل توضیح داده می شوند و در نهایت نحوه به دست اوردن معادلات فضای حالت سیستم شرح داده می شود. این جلسه تحت عنوان مدلسازی سیستم کوادروتور بخش (3) ارایه می شود.
مدت زمان: 52 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه به علم ایرودینامیک پرواز پرداخته می شود. نیروهای ایرودینامیکی به طور کامل توضیح داده می شوند و سپس ایرودینامیک عمودپروازها به طور اختصاصی برای سیستم کوادروتور مطرح و روابط ان استخراج می گردد. در ادامه نحوه محاسبه سرعت و مسیر باد که مهمترین عامل اغتشاش خارجی بر هم زننده تعادل این سیستم پرنده می باشد، مطرح می گردد. این جلسه تحت عنوان ایرودینامیک پرواز (1) ارایه می شود.
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
این جلسه در ادامه جلسه پنجم ، به تکمیل روابط ریاضی ایرودینامیک پرواز سیستم کوادروتور می پردازد. در ادامه روش های محاسبه نیروی دراگ جهت تخمین بردار و مسیر باد به طور کامل شرح داده می شوند و در نهایت معادلات فضای حالت سیستم کوادروتور به همراه اثرات ایرودینامیکی استخراج می گردند. این جلسه تحت عنوان ایرودینامیک پرواز (2) ارایه می شود.
مدت زمان: 50 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
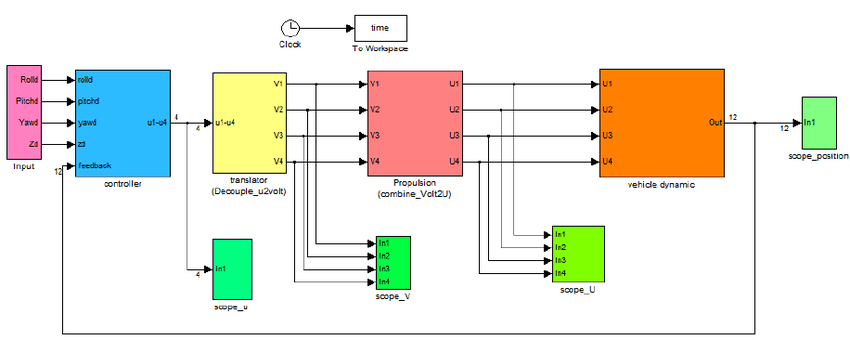
در این جلسه به ساختار کنترلی سیستم کوادروتور پرداخته می شود و تمامی لایه های کنترلی به همراه بلوک دیاگرام انها و ارتباط بین هریک از این لایه های کنترلی به طور کامل مطرح می گردد . دانش کسب شده در این جلسه پیش زمینه طراحی هر نوع کنترلر دلخواه برای این سیستم پرنده می باشد.
مدت زمان: 66 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه فیلتر کالمن پیوسته توسعه یافته به عنوان یک مشاهده گر و تخمین زننده مطرح در سیستم های غیر خطی معرفی می گردد و در نهایت نحوه تخمین متغیرهای حالت سیستم کوادروتور بر مبنای این نوع فیلتر خاص به طور کامل توضیح داده می شود..
مدت زمان: 70 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس
کیفیت: 720P
در این جلسه نحوه پیاده سازی روش کنترلی مد لغزشی بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 72 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720P
در این جلسه نحوه پیاده سازی الگوریتم بهینه سازی ژنتیک به عنوان یک روش تحلیلی ، جهت محاسبه دقیق تری از پارامترهای کنترل کننده مد لغزشی اموزش داده می شود.
مدت زمان: 74 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی فیلتر کالمن پیوسته توسعه یافته ، جهت تخمین متغیرهای حالت سیستم کوادروتور در نرم افزار متلب اموزش داده می شود.
مدت زمان: 47 دقیقه
فایل های همراه: فایل تصویری ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه نحوه پیاده سازی کنترل کننده پسگام (Backstepping) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان: 57 دقیقه
فایل های همراه: فایل تصویری ، پاورپوینت درس ، m-file های نرم افزار متلب
کیفیت: 720p
در این جلسه اموزشی ، نحوه پیاده سازی یک کنترل کننده مقاوم و بهینه ترکیبی(ROSMC) بر مبنای معادلات ریکاتی وابسته به حالت ( SDRE) تحت عنوان (Robust Optimal Sliding Mode Control based on SDRE) ، بر روی سیستم کوادروتور به صورت تیوری و به صورت شبیه سازی شده در نرم افزار متلب در چهار بخش جداگانه به صورت زیر اموزش داده می شود.
مدت زمان جلسه :4 ساعت و30 دقیقه
فایل های همراه جلسه: فایل تصویری ، فایل پاورپوینت درس ، ، m-file های نرم افزار متلب
بخش اول :
طراحی قانون کنترل بهینه مقاوم با استفاده از کنترل کننده مد لغزشی بر اساس معادلات
ریکاتی وابسته به حالت
مدت زمان بخش اول : 2 ساعت و 5 دقیقه
فایل های همراه بخش اول: فایل تصویری ، فایل پاورپوینت درس ، فایل PDF پاورپوینت درس
پیش نمایش جلسه اول
بخش دوم:
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Point to Point
مدت زمان بخش دوم : 1 ساعت و 5 دقیقه
فایل های همراه بخش دوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش دوم
بخش سوم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
در حالت Trajectory Tracking
مدت زمان بخش سوم : 35 دقیقه
فایل های همراه بخش سوم: فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش سوم
بخش چهارم :
برنامه نویسی روش کنترلی Robust Optimal Sliding Mode based on SDRE
جهت محاسبه خطای Minimum Mean Square Error
مدت زمان بخش چهارم 45 دقیقه
فایل های همراه بخش چهارم : فایل تصویری ، فایل پاورپوینت درس ، m-file های نرم افزار متلب
پیش نمایش بخش چهارم
در این جلسه اموزشی ، نحوه پیاده سازی کنترل کننده گام به عقب(Backstepping) به صورت ترکیب با فیلتر کالمن توسعه یافته پیوسته (Extended Kalman Bucy Filter) در حالت ردیابی یک مسیر از پیش تعیین شده (Trajectory Tracking) ، بر روی سیستم کوادروتور به صورت شبیه سازی شده در نرم افزار متلب اموزش داده می شود.
مدت زمان جلسه :45 دقیقه
فایل های همراه جلسه: فایل تصویری ، m-file های نرم افزار متلب
 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم


صبا
سلام . ممنون از آموزش خوبتون . بنده همه قسمت های آموزشی شما را متوجه شدم . ولی مقادیر اولیه که برای سطوح اسلاید نوشتین را متوجه نشدم. اخه گفتین که این مقادیر دلخواه هستش و بهتون میگم که چطور حدس بزنید. ممنونمیشم اگه واسم توضیح بدین
مهندس بابایی
سلام بر شما
من معمولا به صورت تجربی این مقادیر رو محاسبه می کنم. شما می توانید از روش های سعی و خطا استفاده کنید و اگر باز هم نشد از روش هایی مانند الگوریتم ژنتیک، الگوریتم مورچگان، روش ضرایب چند جمله ای و……. استفاده کنید. حتی می توانید از مقادیر موجود در مقالات مشابه نیز استفاده نمایید. دقت کنید که تعیین مقادیر اولیه به عوامل مختلف شرایط حاکم بر مساله همچون وجود و عدم وجود اغتشاش نیز می تواند وابسته باشد.
موفق باشید.
محمد علی
با سلام و عرض ادب . بنده کنترل کننده مد لغزشی که شما بر روی کوادراتور پیاده کردید را دارم روی هواپیما پیاده میکنم( البته ورودی های من تراست ، الویتور ، رادر و ایلرون هست) . به تنها مشکلی که برخوردم پیدا کردن مقادیر اولیه برای سطوح اسلاید میباشه. خیلی از مقاله ها را زیر و رو کردم ولی چیزی پیدا نکردم .ممنون میشم اگه بتونین بهم کمک کنین
مهندس بابایی
سلام بر شما
من با سیستم هواپیما کار نکرده ام. من معمولا به صورت تجربی این مقادیر رو محاسبه می کنم. می تونید از روش های سعی و خطا استفاده کنید و اگر باز هم نشد از روش هایی مانند الگوریتم ژنتیک استفاده کنید. در نهایت اگر خودتون موفق به محاسبه نشدید می تونید با ایدی تلگرام من در تماس باشید که ببینم می تونم براتون انجام بدم یا خیر.
Rose_Babaie@
موفق باشید.
محمد علی
سلام . وقت بخیر .بسیار سپاسگزارم از بابت آموزش خوبتون و قدرت بیان تدرس .سوال بنده این هست که مقادیر سطوح اسلاید را خودتون قرار دادین یا از مقاله ای برداشت کردین .
مهندس بابایی
سلام بر شما
از حسن توجه شما به این مجموعه اموزشی سپاسگزاریم.
این مقادیر به صورت تجربی قرار داده شده اند اما شما می توانید در طراحی های خود از مقادیر به کارگرفته شده در مقالات هم استفاده نمایید.
موفق باشید.
mohsen
سلام
در جلسه 9 موضوع مد لغزشی
اگر شما کنترلر شماره u1 را رسم کنید . به سمت صفر نمی رود!! چرا ؟
مهندس بابایی
سلام بر شما
مگر قرار است u1 لزوما صفر شود؟!!!!
u1 نیروی کنترلی جهت بالا بردن سیستم پرنده در راستای عمود بر حسب نیوتن است و طراحی باید به سمتی پیش رود که این تلاش کنترلی در کمترین میزان خود نسبت به شرایطی که کوادروتور در ان قرار دارد، ثابت بماند. و این به هیچ عنوان به معنای لزوما صفر شدن این تلاش کنترلی نیست.
موفق باشید.
reza
سلام خانم دکتر بابایی از چه کواد کوپتری برای این کد استفاده کردی
مهندس بابایی
سلام بر شما
فقط دانکاه ها و موسساتی که انحصاری بر روی ساخت کوادذوتور کار می کنند برای ان یک نام منحصر به فرد استفاده می کنند، در غیر این صورت تمامی انها با نام واحد کوادروتور مطرح می شوند. در اینجا هم از مدل های چهار روتوره به کار گرفته شده در مقالات معتبر استفاده می شود که همگان دارای یک مدل دینامیکی یکسان هستند و در نهایت به رفرنس اصلی ارجاع داده می شود.
موفق باشید.
reza
اسم کواد کوپتری که اموزش دادی چی هست سلام دکتر
محمد علی
سلام وقت بخیر
چرا در طراحی کنترلر ،اثر نیروهای ایرودینامیکی لحاظ نشده؟
مهندس بابایی
سلام بر شما
این نیروهای ایرودینامیکی تا جای مورد نیاز در بخش مدل سازی سیستم با استفاده از ضرایب انها همچون ضریب نیروی دراگ به سیستم اعمال شده اند. به جلسات ابتدایی مربوط به مدلسازی سیستم کوادروتور مراجعه نمایید. پس از ان در بخش طراحی کنترلر، به اثرات نیروی اغتشاش بر کنترلر متمرکز می شویم.
موفق باشید.
رضا
سلام
خسته نباشید
در رابطه با ویدیو طراحی کنترلر مد لغزشی(جلسه نهم) دو تا سوال داشتم:
1-دلیل تعریف تابع لیاپانوف برای چی بود؟ چون توی برنامه متلب هیچ اثری از تابع لیاپانوف نبود برای همین دلیل تعریف یه تابع مثل تابعی که تعریف کردید و متوجه نمیشم
2-به چه دلیلی باید یه ثابتی مثل اپسیلون تعریف کنیم و برای چی باید این مقدار را در تابع تانژانت هایپربولیک به صورتی که در کد مشاهده شد(تقسیم بر مقادیر مد لغزشی درون تابع هایپربولیک ) اثر بدیم؟
ممنون میشم اگه یه توضیحی بفرمایید.
مهندس بابایی
سلام بر شما
پاسخ سوال اول شما در دقیقه 13 الی 17 فیلم اموزشی به طور کامل توضیح داده شده است.
پاسخ سوال دوم شما نیز در دقیقه 52 فیلم اموزشی کامل توضیح داده شده است. در واقع تانژانت هایپربولیک تقسیم بر اپسیلون، تعریف برنامه نویسی کد متلب برای معادل تابع ساین (s) در حالت تیوری می باشد. هر دو یک معنی و عملکرد دارند، اما برای حالت برنامه نویسی و حذف چترینگ از تانژانت هایپربولیک تقسیم بر اپسیلون استفاده می شود.
پیشنهاد می کنم یک بار دیگر این جلسه اموزشی را مجددا مشاهده بفرمایید.
همچنین نکته مهم ان است که بهتر است جلسات اموزشی به ترتیب اموزش دنبال شوند، یعنی حتما باید تمام جلسات از ابتدا به ترتیب ملاحظه شود، وگرنه نکاتی در جلسات بعد ارایه می شود که اگر کسی جلسات قبل تر را مشاهده نکرده باشد ممکن است دچار سردرگمی شود.
موفق باشید.
رضا
سلام خسته نباشید
در رابطه با بسته آموزشی کوادکوپتر میخواستم بدونم که مناسب چه افرادی
هست؟ و چه چیزهایی شامل آموزش میشه؟
من برای پروژه مربوط به دانشگاهم نیاز دارم تا نحوه کنترل یک کوادکوپتر به طوری که یک مسیر دلخواه و دنبال کنه رو یاد بگیرم. میخواستم بدونم این آموزش تا چه حدی کمک کننده هست؟
مهندس بابایی
سلام بر شما
این اموزش برای تمامی دانشجویان رشته های برق، مکانیک، مکاترونیک و هوافضا قابل استفاده می باشد. روش های کنترلی به کار گرفته شده در این اموزش ابتدا با زبانی ساده اموزش داده می شوند که حتی دوستانی که رشته انها برق نیست نیز بتوانند از این مجموعه بهره ببرند.
برای اطلاع از روش های پیاده سازی شده می توانید به توضیحات هر جلسه مراجعه نمایید.
موفق باشید.
بنان
سلام و روز بخیر خانم دکتر بابایی.
این دوره پیش نیاز داره؟
مهندس بابایی
سلام بر شما
این اموزش بر مبنای روش های کنترل غیر خطی می باشد, بنابراین تسلط به مباحث کنترل غیرخطی قطعا به شما بیشتر کمک خواهد کرد، اما در این مجموعه اموزشی، روش های به کار گرفته شده با زبانی ساده اموزش داده شده اند که دوستانی که به مباحث تسلط کافی را نیز ندارند و یا از رشته غیر مرتبطی هستند نیز بتوانند به راحتی روش های اموزش داده شده را پیاده سازی نمایند. بنابراین به پیش نیاز خاصی نیازمند نمی باشید.
موفق باشید.