 مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
مرجع مهندسی كنترل | دانش با کیفیت در مرز علم
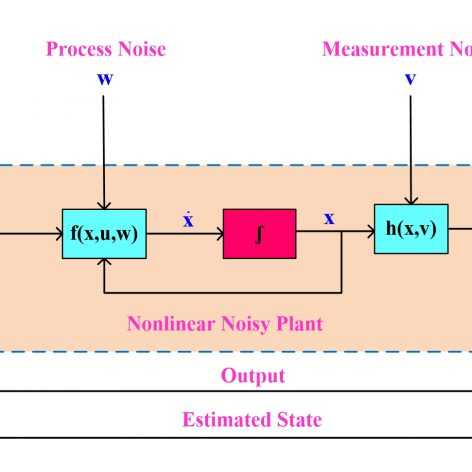
همونطور که میدانید بحث تخمینگر (Estimator) یا رویتگر (Observer) نه تنها در مهندسی کنترل (Control Engineering) و مهندسی برق (Electrical Engineering)، بلکه…
فصل اول: 5-6-8-11-14-20 فصل دوم: 1-2-3-4-5-6-7-8-9-10-11-14-15-16 فصل سوم: 1-2-3-6-7-8-12-15-16-17 فصل چهارم: 1-2-3-4-5-6-7-10 فصل پنجم: 1-2-3-4-6-7-8-9-11-12 فصل هفتم: 9 درصورتیکه تمرینات دیگری مد…
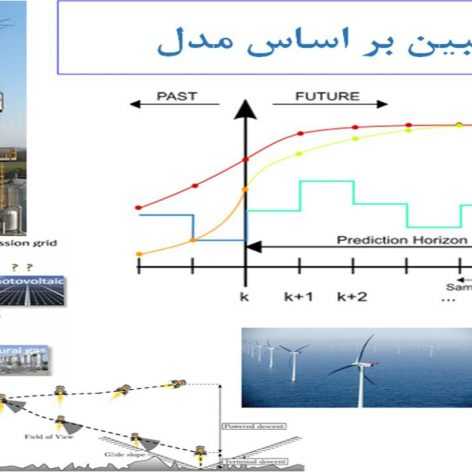
در این پست آموزش کنترل پیشبین بر اساس مدل قرار داده شده است. کنترل پیش بین بر اساس مدل (Model Predictive Control…
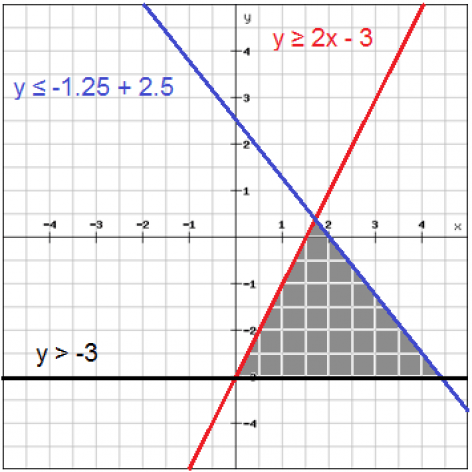
احتمالا برای شما هم پیش اومده که در یک مقاله یا کتاب به جایی رسیدید که باید یک ناتساوی ماتریسی خطی (یا LMI) رو حل کنید و در بدر دنبال یک نفر هستید تا در کوتاهترین زمان ممکن حل این نوع ناتساوی ها رو به شما یاد بدهد.
تمرینات کتاب کنترل غیرخطی اسلاتین به مرور زمان در همین پست قرار داده می شوند. تمرینات فصل دوم رو که به طور…
در این پست آموزش ویدئویی زنجیره و فرآیند تصادفی مارکوف قرار داده شده است. زنجیره مارکوف (Markov Chain) یا فرآیند مارکوف (Markov…

این پست مربوط به جلسات مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما است. اصطلاح انگلیسی این عبارت 6DOF Aircraft Modeling and Simulation است.
کنترل بهینه (Optimal Control) به عنوان یکی از روشهای مدرن کنترلی، جایگاه ویژهای در بحث سیستمهای کنترل دارد. یکی از روشهای کنترلی بهینه رگولاتور درجه دوم خطی (Linear Quadratic Regulator) است که به اختصار LQR خوانده میشود.

در این پست فیلم آموزش مد لغزشی طبق کتاب اسلوتین قرار داده میشود. کتاب اسلوتین رو اگه خونده باشید متوجه خواهید شد که بسیاری از مطالب این فصل گنگ هستند و نیاز به توضیحات بیشتر دارند.
در این پست آموزش مدارهای الکتریکی قرار داده شده است. آموزش های زیادی در زمینه آموزش مدارهای الکتریکی توی اینترنت وجود دارد. آقای دکتر اسداللهی رتبه اول ارشد و دکترا این آموزش را در اختیار شما قرار میدهند.
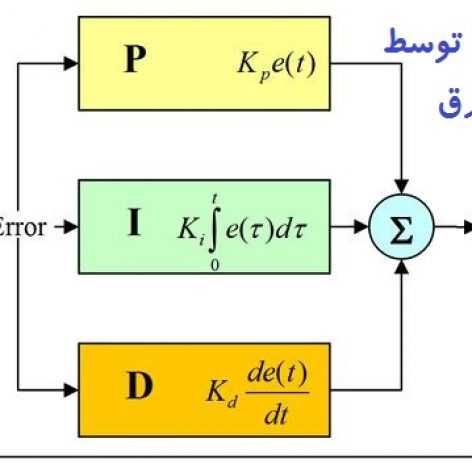
در این پست آموزش کنترل خطی قرار داده خواهد شد. آموزش های زیادی در زمینه آموزش کنترل خطی توی اینترنت وجود داره….

نرم افزار Cadence IC Design یکی از حرفهای ترین نرم افزارهای طراحی مدارات مجتمع است که این نرم افزار توسط شرکت Cadence ارائه شده است. این نرم افزار در محیط سیستم عامل لینوکس اجرا میشود.
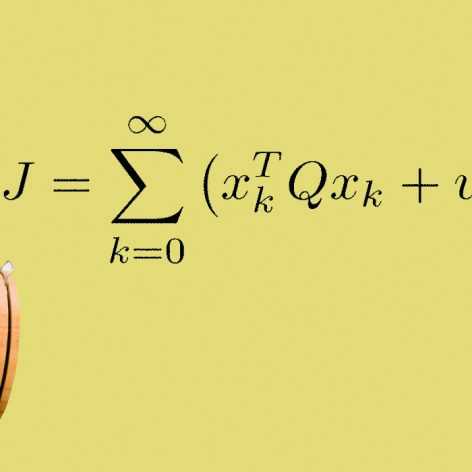
کنترل بهینه دارای تعارف جدید و روش های ریاضی پیچیده ای برای حل مسائل است. مرجع مهندسی کنترل سری آموزش بهینه را برای شما آماده کرده است.
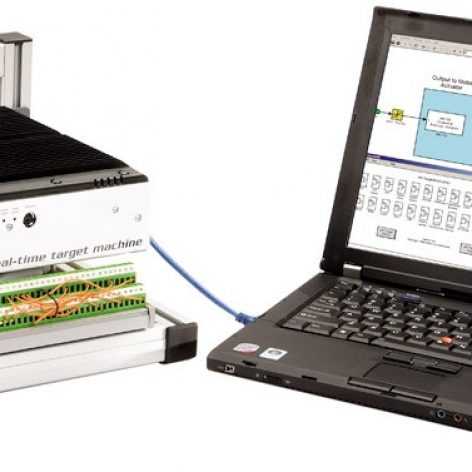
امروزه با توجه به قابلیتهای بالای نرم افزار Matlab و Simulink، متخصصان حوزه های مختلف طراحی های خود را در محیط سیمیولینک انجام میدهند. در بسیاری از کاربردهای تحقیقاتی، علمی و صنعتی، نیاز به برقراری ارتباط سخت افزاری وجود دارد.

سیستمهای ناوبری یکی از اجزای لاینفک سیستمهای کنترل و هدایت موشکها، هواپیماها و … هستند. هدف یک سیستم ناوبری تعیین وضعیت و…
در این پست انواع مد لغزشی مرتبه بالاتر (HOSMC) قرار داده می شود. انواع مد لغزشی مرتبه بالاتر که قرار است به صورت فیلم آموزشی در این پست قرار داده شود به صورت زیر می باشند:مد لغزشی مرتبه دو،مد لغزشی دینامیک،مد لغزشی ترمینال
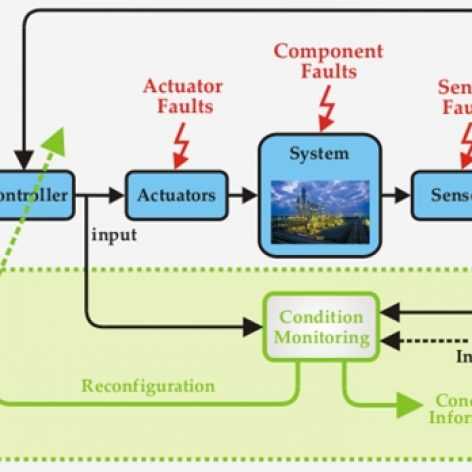
در این پست، اولین جلسه از سری جلسات “مبانی سیستم های تحمل پذیر عیب” رو براتون گذاشتیم که مقدماتی رو در این مورد ارایه می کنیم. تاریخچه و روند تحقیقاتی تو این زمینه خیلی خلاصه بیان شده و اصطلاحاتی رو تو این زمینه ارایه کردیم.

روش کنترلی backstepping در کشور ما با عناوین گام به عقب، بازگشت به عقب و پسگام نام گذاری شده است. این روش کنترلی یک روش کلاسیک و تحلیلی می باشد. روش گام به عقب یکی از روش های کنترلی مقاوم می باشد.

امروزه با توجه به قابلیتهای بالای نرم افزار Matlab و Simulink، متخصصان حوزه های مختلف طراحی های خود را در محیط سیمیولینک انجام میدهند. در بسیاری از کاربردهای تحقیقاتی، علمی و صنعتی، نیاز به برقراری ارتباط سخت افزاری وجود دارد.
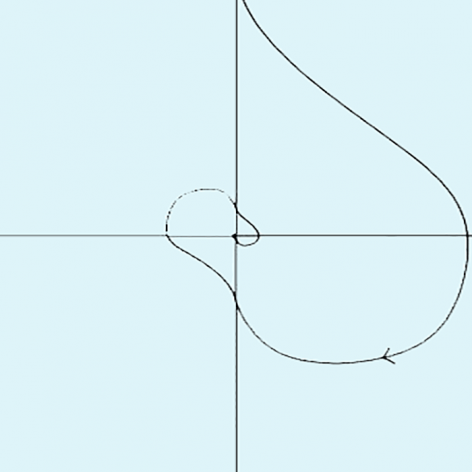
درس سسیتمهای کنترل دیجیتال (Digital Control Systems) یکی از مهمترین دروس مهندسی برق-کنترل است که دانشجویان این رشته در دوره کارشناسی یا ارشد این درس سه واحدی را میگذرانند.
مهندسی مکانیک
این پست مربوط به جلسات مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما است. اصطلاح انگلیسی این عبارت 6DOF Aircraft Modeling and Simulation است.
امروزه با توجه به قابلیتهای بالای نرم افزار Matlab و Simulink، متخصصان حوزه های مختلف طراحی های خود را در محیط سیمیولینک انجام میدهند. در بسیاری از کاربردهای تحقیقاتی، علمی و صنعتی، نیاز به برقراری ارتباط سخت افزاری وجود دارد.
سیستمهای ناوبری یکی از اجزای لاینفک سیستمهای کنترل و هدایت موشکها، هواپیماها و … هستند. هدف یک سیستم ناوبری تعیین وضعیت و…

دانشجویان مهندسی مکانیک به عنوان پیش زمینه در دروس محاسبات عددی و دینامیک سیالات محاسباتی بایستی به برنامه نویسی فرترن تسلط داشته باشند. مطالعه کدها و همچنین توسعه دادن کدهای جدید مستلزم آشنایی با زبان برنامه نویسی فرترن می باشد.
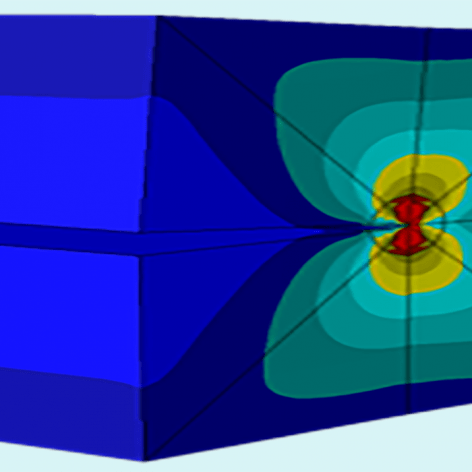
پایداری هواپیما شامل دو بخش پایداری استاتیکی و دینامیکی بوده و به ترتیب عبارت است از تمایل ذاتی هواپیما در مخالفت با هر گونه اغتشاش داخلی (دستورات خلبان) یا بازگشت به حالت تعادل اولیه پس از برخورد هر گونه اغتشاش خارجی (تلاطمات جوی و باد).
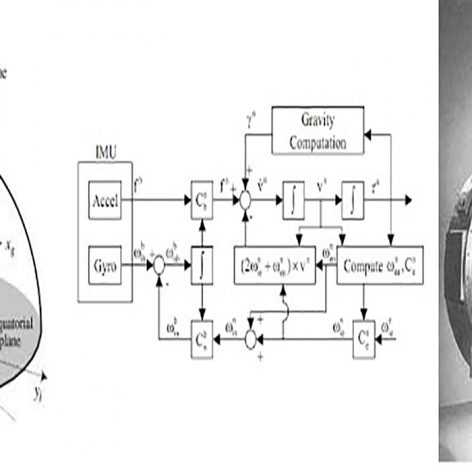
عملکرد سیستمهای ناوبری اینرسی (Inertial Navigation System : INS) بر قوانین مکانیک کلاسیک که بیان ریاضی آنها توسط نیوتن انجام شد، مبتنی است. یک سیستم ناوبری اینرسی معمولا از سه شتاب سنج و سه ژیروسکوپ استفاده می کند.
جلسه اول : جلسه دوم : جلسه سوم : جلسه چهارم : جلسه پنجم : جلسه ششم :

در مجموعه آموزش انتقال حرارت، درس انتقال حرارت 1، به عنوان یک درس پایه و دانشگاهی برای رشته های مهندسی مختلفی از…
این پست مربوط به جلسات مجموعه آموزشی مدلسازی و شبیه سازی 6 درجه آزادی هواپیما است. اصطلاح انگلیسی این عبارت 6DOF Aircraft Modeling and Simulation است.
سیستمهای ناوبری یکی از اجزای لاینفک سیستمهای کنترل و هدایت موشکها، هواپیماها و … هستند. هدف یک سیستم ناوبری تعیین وضعیت و…
پایداری هواپیما شامل دو بخش پایداری استاتیکی و دینامیکی بوده و به ترتیب عبارت است از تمایل ذاتی هواپیما در مخالفت با هر گونه اغتشاش داخلی (دستورات خلبان) یا بازگشت به حالت تعادل اولیه پس از برخورد هر گونه اغتشاش خارجی (تلاطمات جوی و باد).
عملکرد سیستمهای ناوبری اینرسی (Inertial Navigation System : INS) بر قوانین مکانیک کلاسیک که بیان ریاضی آنها توسط نیوتن انجام شد، مبتنی است. یک سیستم ناوبری اینرسی معمولا از سه شتاب سنج و سه ژیروسکوپ استفاده می کند.
مباحثی که خدمت شما بزرگواران ارائه می شود، مربوط به کنترل هواپیما است که از پارت دوم از کتاب Roskam تدریس شده…
[vc_row][vc_column width=”1/2″][vc_separator][vc_column_text][/vc_column_text][vc_row_inner][vc_column_inner][vc_separator][vc_text_separator title=”جلسه چهارم” color=”juicy_pink”][vc_text_separator title=”بخش اول”][vc_column_text]در این جلسه فرم تفاضل محدود به روش ضمنی معرفی می شود. روش ضمنی منجر به…
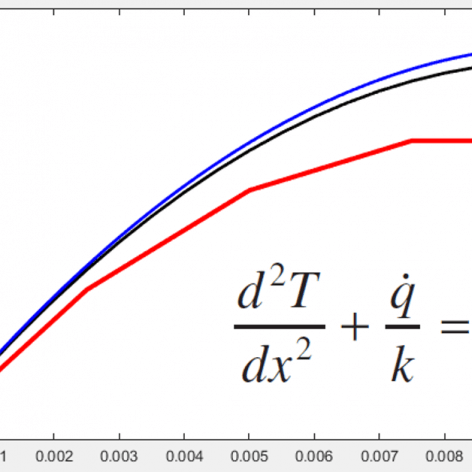
[vc_row][vc_column width=”1/2″][vc_separator][vc_column_text][/vc_column_text][vc_row_inner][vc_column_inner][vc_separator][vc_text_separator title=”جلسه چهارم” color=”juicy_pink”][vc_text_separator title=”بخش اول”][vc_column_text]در بخش اول ضمن معرفی روشهای تفاضل محدود مکانی، زمانی مرتبه اول و مرتبه دوم، مفهوم…
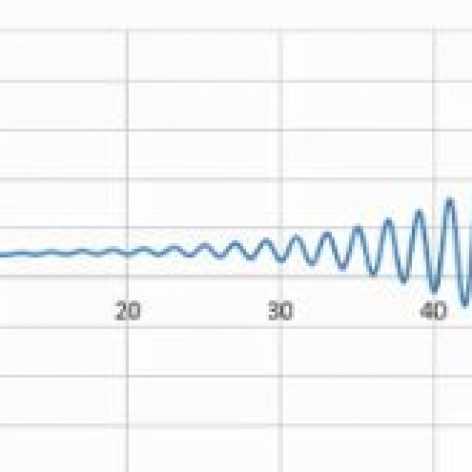
[vc_row][vc_column width=”1/2″][vc_separator][vc_column_text][/vc_column_text][vc_row_inner][vc_column_inner][vc_separator][vc_text_separator title=”جلسه چهارم” color=”juicy_pink”][vc_text_separator title=”بخش اول”][vc_column_text]در این بخش ابتدا خلاصه ای از جلسه قبل بیان می شود. سپس معادله گرما در…
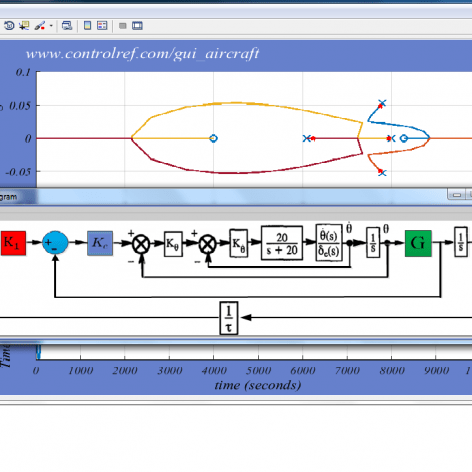
واسط های گرافيکي که در این قسمت ارائه شده است، مربوط به درس فیلتر کالمن از کتاب DanSimon است که دوست خوبم…
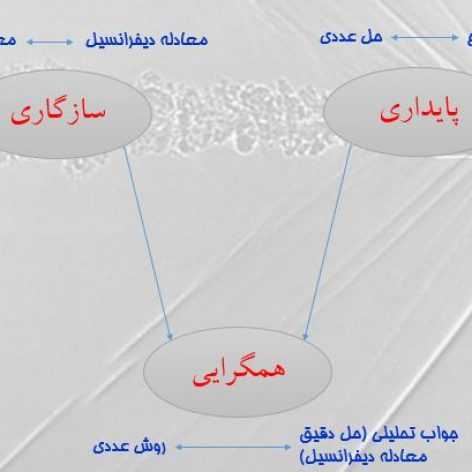
[vc_row][vc_column width=”1/2″][vc_separator][vc_column_text][/vc_column_text][vc_row_inner][vc_column_inner][vc_separator][vc_text_separator title=”جلسه هفتم” color=”juicy_pink”][vc_text_separator title=”بخش اول”][vc_column_text]در این بخش ضمن یاد آوری مطالب گذشته، از جمله روش های ضمنی و صریح در…
